

ЦСУ_Егоров
.pdf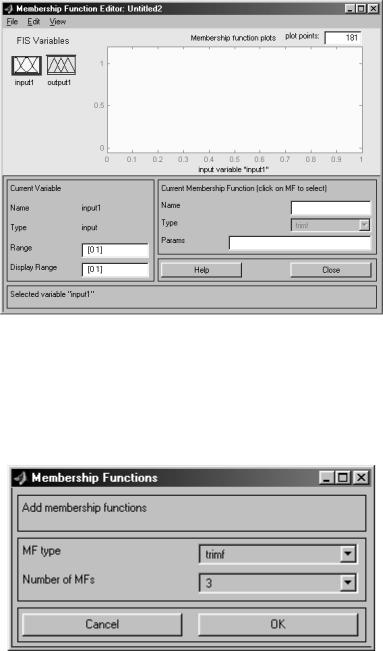
Рисунок 8.15 Окно редактора функций принадлежности
В открывшемся окне рис. 8.15 в меню Edit выбираем команду Add mf после чего появляется окно показанное на рис. 8.16 предлагается выбрать тип функции принадлежности и их количество;
Рисунок 8.16 Окно Функций принадлежности
Далее возвратившись в окно на рис. 8.15 выделив левой клавишей мыши соответственно прямоугольник под которым надпись output(выход) проделаем аналогичную операцию только уже для выходных функций принадлежности в этом же окне предоставляется возможность редактиро- вания заданных функций принадлежности, после чего нажатием левой клавиши мыши по прямоугольнику с подписью mamdani мы переходим в окно редактора правил Rule Editor(редактор правил) в котором можно за- дать правила фаззи регулятора;
В меню File как показано на рис. 8.17 сохраняем созданный файл под оригинальным именем с расширением *.fis на жестком диске;
163
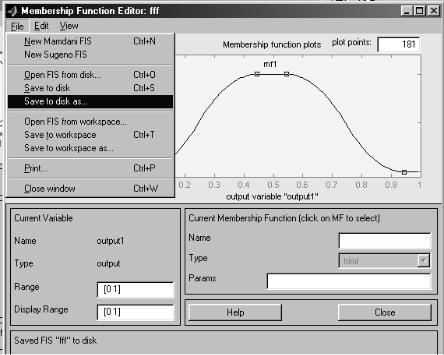
Рисунок 8.17 Пример сохранения изменений проекта
Для того чтобы созданный алгоритм можно было использовать fuzzy регулятором в Simulink нужно сохранить этот файл в рабочей области ана- логичными действиями указанными в предыдущем пункте;
Обязательное условие работы регулятора с созданным файлом это совпадение имен simulink блока регулятора и .fis файлов.
8.5 Разработка и исследование систем перемещения ковша с металлом на базе фаззи-логики
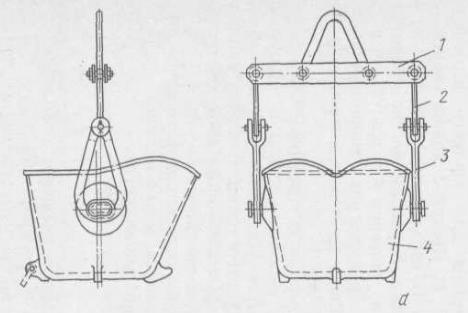
Рассмотрим пример использования фаззи-регулятора для управления технологическими установками.
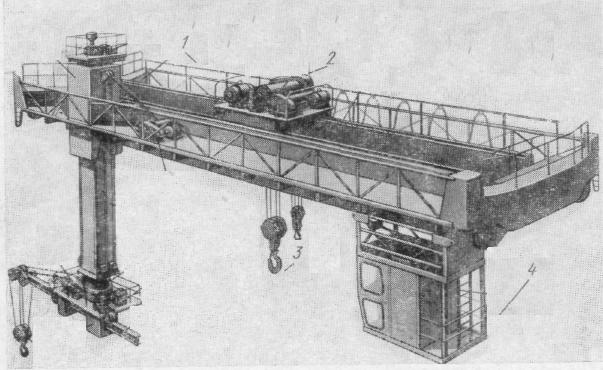
При работе грузоподъемных машин со свободным подвесом грузов (краны мостовые общего назначения, перегрузочные, козловые, поворот- ные всех систем т.п.) наблюдается поперечное раскачивание грузов. Это явление возникает при пуске и остановке механизмов горизонтального пе- ремещения.
Раскачивание грузов является причиной неравномерного движения механизма перемещения, дополнительных нагрузок на элементы грузо- подъемных машин и создает неудобства, угрожающие безопасности рабо- ты такелажников.
Проведем исследование процессов раскачивания грузов при пуске и остановке механизмов горизонтального перемещения для некоторых ос- новных случаев, отыскивая одновременно способы устранения или хотя
164
A
ϕ
L
В
mg
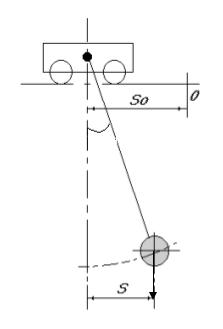
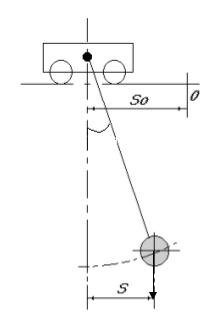
Рисунок 8.19 Перемещение крана и груза
где S -перемещение груза; So - перемещение крана; L-длина подвеса маятника; ϕ -угол отклонения маятника
Отношение |
|
S |
|
(треугольник АВС можно заменить на |
S |
= sinϕ |
). |
||||||||
|
L |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
||
Таким образом дифференциальное уравнение: |
|
|
|
||||||||||||
mгр × ( |
d |
2 |
S |
- |
d |
2 |
S0 |
) + mгр |
× g × sin ϕ = 0 |
|
|
|
(8.12) |
||
|
|
, |
|
|
|
||||||||||
dt |
|
|
|
|
|
|
|
||||||||
|
2 |
|
|
|
dt 2 |
|
|
|
|
||||||
является математической моделью перемещения крана и груза.
Тогда уравнение (8.12) имеет вид
|
d |
2 |
S |
|
d |
2 |
S |
|
(8.13) |
|||||
|
|
- |
|
0 |
|
+ g × sin ϕ = 0 , |
||||||||
|
dt |
2 |
|
|
|
|
2 |
|
||||||
|
|
|
|
|
|
|
dt |
|
|
|
||||
|
d |
2 |
S |
|
|
|
d |
2 |
S |
|
(8.2.4) |
|||
|
|
|
= |
|
0 |
|
- g ×sin ϕ , |
|||||||
|
dt |
2 |
|
|
|
|
2 |
|
|
|||||
|
|
|
|
|
|
|
dt |
|
|
|
||||
|
|
|
|
d 2 S |
|
|
|
|
|
|||||
где |
|
|
|
-ускорение крана которое можно измерить в процессе работы, |
||||||||||
|
|
dt 2 |
||||||||||||
перемещение груза:
166
A
ϕ
L
В
mg
Рисунок 8.22 Перемещение крана и груза
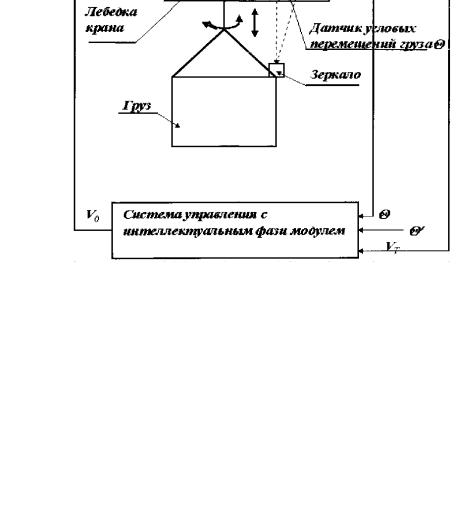
Для крана выбран привод постоянного тока независимого возбужде- ния с системой подчиненного управления.
Не вдаваясь в подробности вывода модели привода изобразим ее в виде двухконтурной системы с свернутым контуром тока (колебательное звено второго порядка) и контура регулирования частоты вращения. Рабо- тает модель следующим образом: крановщик приводит ключ в положение, обеспечивающее перемещение крана. Кран начинает перемещаться и груз на тросе раскачивается. Скорость качания груза вычисляется в реальном времени.
Необходимая скорость перемещения крана определяется путем фази- высказываний (правил), которые базируются на трех лингвистических пе- ременных: угол качания, скорость угла качания, разница между заданной и реальной скоростью крана.
Создание модели системы производилось в пакете Simulink, которая изображена на рис. 8.23.[7]
169

Рисунок 8.23 Модель системы регулирования угла качания груза
Описание основных блоков модели:
1-вертикальный движок, который представляет собой задатчик скорости привода; 2-модель привода постоянного тока;
3-модель фаззи регулятора;
4-блок интегратора;
5-подсистема модели математического маятника;
6-блок анимации.
В процессе моделирования системы в качестве модели привода кра- на использована модель двигателя постоянного тока которая показана на рис.8.24.
3
4 5
2
1
Рисунок 8.24 Модель привода постоянного тока
170
Описание основных блоков модели:
1.Блок с передаточной функцией замкнутого контура тока;
2.Контур регулирования скорости;
3.Контур регулирования положения.
4.Вход для переменной значения задания скорости с пульта оператора;
5.Вход для переменой значения выхода регулятора Модель привода постоянного тока имеет в своем составе П-
регулятор скорости и П-регулятор положения. Данная модель привода со- держит блок с передаточной функцией замкнутого контура тока 1, контур регулирования скорости 2, который подчинен контуру положения 3. Кон- тур положения вырабатывает задание для контура скорости. С выхода ре- гулятора скорости сигнал поступает на замкнутый контур тока 1. В данной модели имеется ограничение по току. Сигналы с блоков 4 и 5 поступают на вход сумматора, где из сигнала 4 вычитается сигнал 5 и далее полученное значение сигнала поступает на вход контура регулирования положения.
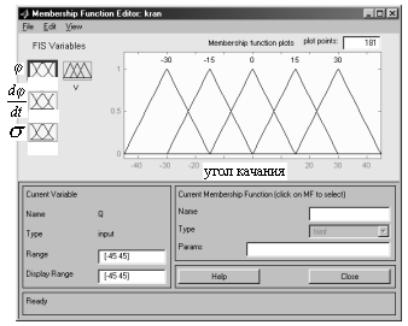
Выбор функции принадлежности
Функции принадлежности для входных переменных показаны на рис. 8.25.
Рисунок 8.25 Функции принадлежности для входной переменной ''ϕ ''(угол качания).
Функции принадлежности выбраны треугольной формы. Весь диапа- зон качания от –40 0 до 400 разбит на пять пересекающихся поддиапазонов.
171