

ЦСУ_Егоров
.pdf
|
|
|
|
|
1 |
|
T |
|
|
|
|
|
(3.67) |
|||
R (τ ) = lim |
|
|
∫ a sin (ωt + ϕ )a sin (ωt + ωτ + ϕ )dt = |
|
||||||||||||
|
|
|
|
|||||||||||||
|
|
T → ∞ 2T |
|
−T |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= lim |
1 |
T |
a |
2 |
|
[cos ωτ − cos (2ωt + ωτ + 2ϕ )]dt = |
|
|||||||||
∫ |
|
|
|
|||||||||||||
|
2 |
|
|
|||||||||||||
T → ∞ 2T |
−T |
|
|
|
|
|
|
sin (2ωT + ωτ + 2ϕ )+ sin (2ωT − ωτ − 2ϕ ) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
a 2 |
|
|
|
|
|
|
|
|
|
1 |
|
|||||
|
cos ωτ |
− lim |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
2ω |
|||||||||||
2 |
|
|
|
|
T → ∞ 2T |
|
|
|
||||||||
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
R ( τ ) = |
a |
2 |
cos ωτ . |
|
(3.68) |
|||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||
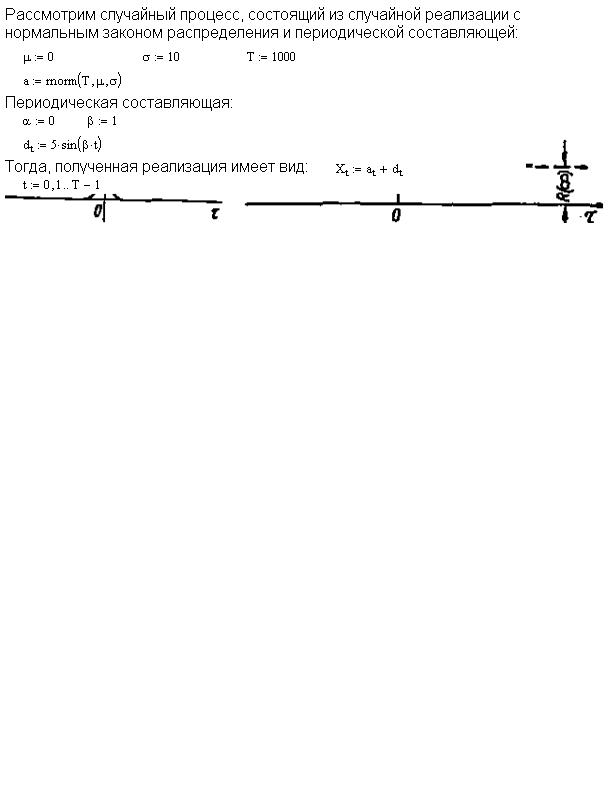
Мы видим, что функция R(τ) имеет тот же период, что и функция x(t), но в отличие от нее является четной и не зависящей от фазы φ.
Точно так же легко показать, что для функции
n |
|
|
(3.69) |
x(t ) = a0 + ∑ak sin(ωk t + ϕk ) |
|
||
k =1 |
|
|
|
корреляционная функция R(τ) имеет вид |
|
||
n |
2 |
|
(3.70) |
R (τ ) = a02 + ∑ |
a k |
cos ω kτ . |
|
2 |
|
||
k = 1 |
|
|
|
Таким образом можно предположить, что если автокорреляционная |
|||
функция имеет периодическую составляющую, то и случайный процесс тоже содержит периодическую составляющую с тем же периодом.
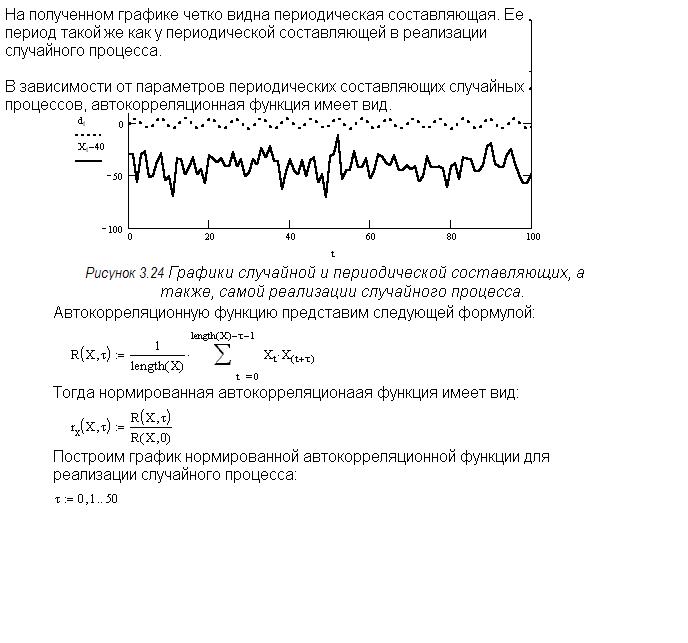
При корреляционном анализе случайных процессов часто пользуют- ся понятием нормированной корреляционной функции р (τ), определяемой равенством
ρ (τ ) = R(τ ) .
R(0)
Очевидно, что ρ (0) = 1 .
Рассмотрим несколько типовых примеров корреляционных функций:
1)Белый шум.
Случайный процесс x(t), который характеризуется тем, что в нем от- сутствует какая-либо взаимная связь между предыдущими и последующи- ми значениями x(t), называется абсолютно случайным процессом или бе- лым шумом. Очевидно, что в этом случае корреляционная функция равна нулю при всех значениях, τ кроме τ = 0, и ее можно представить в виде дельта-функции (рис. 3.21) или практически в виде импульса достаточно малой ширины, площадь которого равна единице.
2)Случайная функция x(t) содержит постоянную составляющую а0.
Вэтом случае корреляционная функция также содержит постоянную составляющую, равную квадрату постоянной составляющей (рис. 3.23).
52
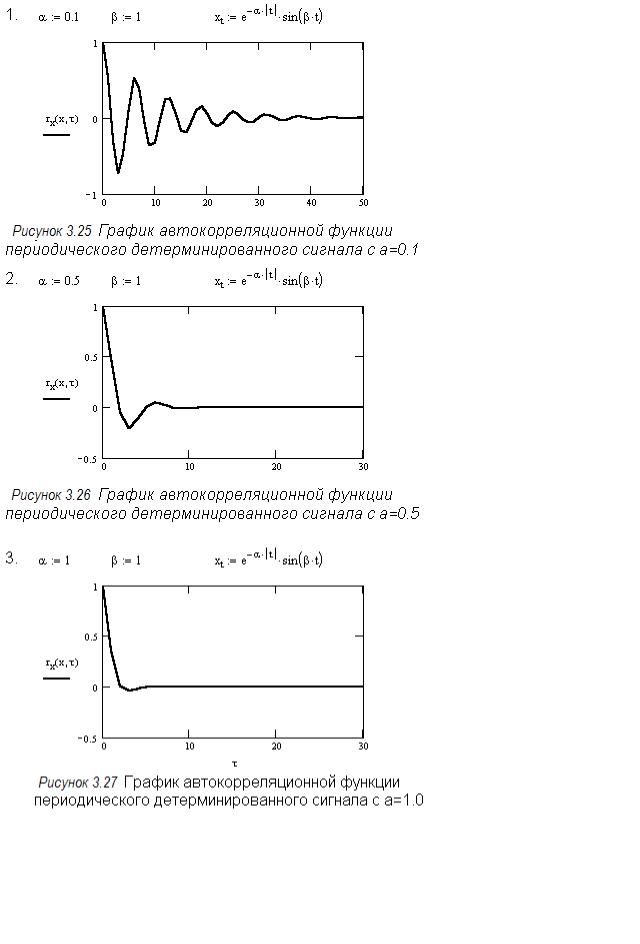
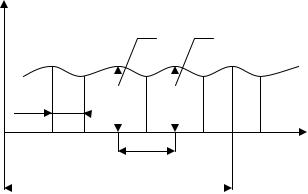
3) Корреляционная функция содержит экспоненциальную и периодиче- скую составляющие и имеет вид (рис.3.23)
ρ(τ) = e−α |
|
τ |
|
cosβτ |
(3.71) |
|
|
||||
|
|
4) Случайная функция содержит периодическую составляющую.
В этом случае корреляционная функция также содержит периодическую составляющую, имеющую тот же период (рис. 3.23).
Рисунок 3.21 Корреляционная |
Рисунок 3.22 Корреляционная функ- |
|
функция белого шума |
ция для сигнала,. содержащего по- |
|
стоянную составляющую. |
||
|
Рисунок 3.23 Корреляционная функция для сигнала, содержащего периодическую составляющую.
53
54
55
Определение корреляционной функции по экспериментальным дан- ным. Корреляционная функция R(τ) может быть получена при помощи об- работки записи случайной функции x(t) следующим образом. Отбросим в формуле переход к пределу, выбрав промежуток времени Т достаточно большим, для того чтобы можно было приближенно написать
|
1 |
T |
(3.72) |
R(τ ) ≈ |
∫ x(t + τ )x(t )dt |
|
|
|
|
T 0
Разделим теперь промежуток времени Т на N весьма малых интерва- лов ∆, т.е. положим, что
T = N ,
и будем придавать t и τ дискретные значения, кратные ∆, т. е. положим, что
1 |
|
1 |
¼ |
(3.73) |
|
t = n |
|
n |
= 0 ,1,2 ,Κ |
||
τ = n |
2 |
n |
2 |
¼ |
|
|
|
= 0 ,1,2 ,K |
|
||
Очевидно, что при сделанных допущениях интеграл в формуле (3.73) можно заменить знаком суммы и написать
56
R(x , n |
|
) ≈ |
1 |
N |
x(n |
)x[( n |
+ n |
|
) |
] |
(3.74) |
|
∑ |
|
|
||||||||
2 |
|
2 |
|
||||||||
|
|
|
1 |
1 |
|
|
|
|
|||
|
|
|
N n1 = N |
|
|
|
|
|
|
||
Формула показывает, каким образом может быть вычислена корре- ляционная функция по экспериментальной кривой х (t) при помощи изме- рения ординат этой кривой, расположенных друг от друга на расстоянии ∆ в пределах рассматриваемого интервала Т.
x(n, )
xn1 xn2
(n1+n2)
n,
T=N
Рисунок 3.28 Определение корреляционной функции из эксперимен- тальным данным
На практике приходится ограничиваться сравнительно небольшими значениями Т, что обусловливает существенно приближенный характер формулы. Кроме того, коррелограммы, т. е. графики функций R(τ), полу- ченные в результате обработки экспериментальных кривых, представляют собой обычно далеко не плавные кривые в отличие от коррелограмм, соот- ветствующих идеальным случаям, рассмотренным выше.
57
4.ПЕРЕДАЧА ИНФОРМАЦИИ
4.1.Передача информации по линиями связи
Как правило, источник информации и устройство ее обрабатываю- щее, располагаются на каком то территориальном расстоянии. Поэтому возникают задачи в передаче информации на расстоянии.
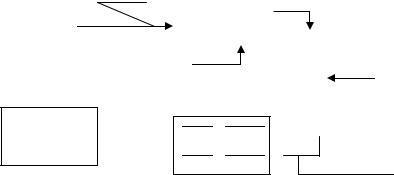
Рассмотрим структурную схему (рис. 4.1) одноканальной системы передачи информации. Информация поступает в систему в виде сообще- ний. Под сообщением понимают совокупность знаков или первичных сиг- налов, содержащих информацию.
Первоначально в технических системах физические параметры ис- точника информации (ИИ) с помощью первичных преобразователей (ПП) преобразуются, как правило, в электрический параметр или электрический сигнал.
Дискретные сообщения формируются в результате последователь- ной выдачи источником отдельных элементов знаков. Непрерывные сооб- щения неразделимы на элементы и описываются функциями времени, принимающими непрерывное множество значений.
|
Источник |
|
Сообще- |
Передающее |
||||||||
|
|
|
устройство |
|||||||||
|
сообщения |
|
|
|
|
|||||||
|
|
ние |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИИ |
|
ПП |
|
|
|
|
К |
|
М |
|
|
|
|
|
носитель |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Приемное
устройство
Получатель ДК
ДК
 ДМ
ДМ
Сообщение
связи |
|
|
|
Источник |
|
Линия |
|
помех |
|
|
|
|
|
Сигнал + помеха
Рисунок 4.1 Одноканальная система передачи информации
ИИ - источник сообщения; ПП – первичный преобразователь; К – кодирующее устройство; М – модулятор; ДМ – демодулятор;
ДК – декодирующее устройство.
58
При обработке информации цифровыми устройствами непрерыв- ные сообщения преобразуются в дискретные.
Для передачи информации по линии связи необходимо сформиро- вать сигнал, отвечающий требованиям этой линии.
Преобразование сообщения в сигнал, удобный для передачи по данному каналу связи называют кодированием (К). Операцию восстанов- ления сообщения по принятому сигналу называют декодированием (ДК).
Для обеспечения простоты и надежности распознавания образцо- вых сигналов их число целесообразно сократить до минимума. Поэтому, как правило, прибегают к операции преобразования исходных знаков из которых составлено сообщение в другой алфавит с меньшим числом зна- ков – такой алфавит называют алфавитом символов. Так как алфавит сим- волов меньше, чем алфавит знаков, то каждому знаку соответствует неко- торая последовательность символов, которая называется кодовой комби- нацией, число символов кодовой операции называют ее значностью, число ненулевых символов – весом. Аналогично для операции сопоставления символов со знаками исходного алфавита используется термин декодиро- вание. В простейшей системе связи кодирующее, а следовательно, и деко- дирующее устройство может отсутствовать.
Передающее устройство осуществляет преобразование непрерыв- ных сообщений или знаков в сигналы, удобные для передачи их по кон- кретной линии связи (либо для хранения в некотором запоминающем устройстве). При этом один или несколько параметров выбранного сигна- ла-носителя изменяют в соответствии с передаваемой информацией. Такой процесс называют модуляцией (М). Обратное преобразование сигналов в символы производится демодулятором (ДМ).
Под линией связи понимают любую физическую среду (воздух, проводники, электромагнитное поле), обеспечивающую передачу сигналов от передающего устройства к принимающему. Сигналы на выходе линий связи могут отличаться от передаваемых, вследствие затухания, искажения от воздействия помех. Помехами называют любые воздействия, искажаю- щие передаваемое сообщение. Например, при передаче электрического сигнала по проводам он может искажаться за счет наводок от электромаг- нитных полей сильноточного оборудования находящегося недалеко от ли- нии связи.
Вприемном устройстве первым этапом преобразования сигнала яв- ляется фильтрация – выделение полезного сигнала на фоне помех. Затем, переданная с помощью сигнала-носителя информация преобразуется в ис- ходный сигнал. Рассмотрим более подробно этапы, связанные с обработ- кой данных (рис. 4.2).
Всамом общем виде можно выделить четыре основные этапы, свя- занные с получением сигнала, его преобразованием и представлением в виде информации, удобной для последующей обработки:
∙сбор и преобразование информации;
59
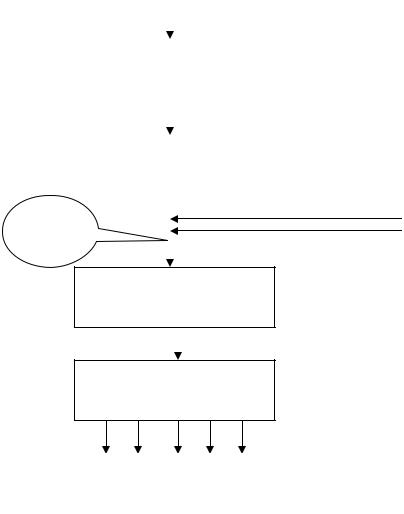
∙формирование сигнала;
∙передача сигнала и по линиям связи;
∙прием сигнала и фильтрация;
∙анализ информации и формирование выходного сигнала.
Информация от объекта управления |
|
||
|
|
|
|
|
Первичные преобра- |
|
Сбор и преобразование |
|
зователи |
|
информации |
|
|
|
|
Вторичные преобра- |
Формирование сигнала |
|
зователи |
|
|
|
Передача по линии связи |
|
|
||
Передатчик |
||
|
||
|
Помехи |
|
|
Линия
связи
Приемник |
Прием сигнала и фильтрация |
|
ЭВМ
Выработка управляющего воздействия
Управляющие воздействия на объект
Рисунок 4.2 Схема обработки информации
Каждый из этих этапов требует выполнения ряда последовательных операций, схематически изображенных на рисунке 4.3.
Первым шагом при сборе данных является преобразование инфор- мации об исследуемом процессе с помощью специальных устройств – из- мерительных преобразователей в промежуточный сигнал. Преобразовате- лем можно считать любое устройство, преобразующее энергию из одной формы в другую. На этапе анализа информации могут выполняться опера- ции идентификации объекта управления.
60
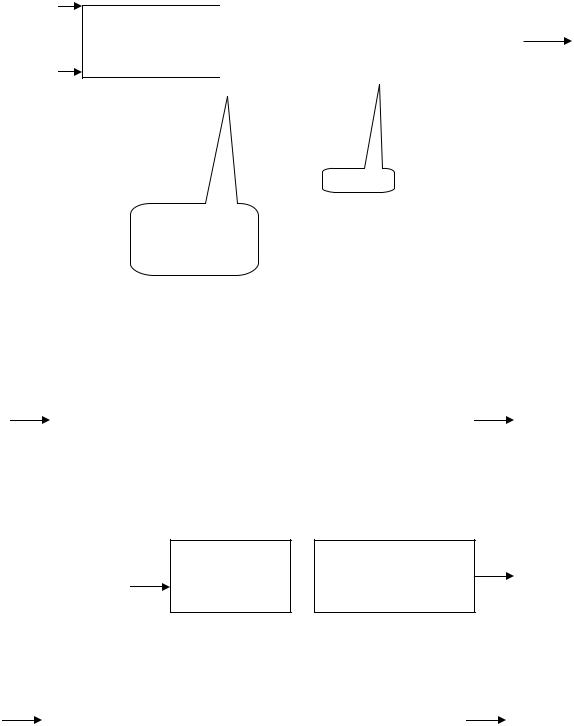
Расчет управляющих воздействий производится либо с использова- нием классических методов теории автоматического управления, опти- мального, адаптивного управления, либо основываясь на положениях тео- рии искусственного интеллекта.
Физическая величина 
Преобразование в |
|
|
|
|
Выход |
|
Нормализация |
|
|||
|
|
|
|
||
электрический па- |
|
усиления |
|
Модуляция |
|
раметр или электр. |
|
|
|
||
|
|
|
|
|
|
сигнал |
|
|
|
|
|
|
|
|
|
|
|
сигнал
Промежуточный
электрический
сигнал
а) сбор данных и формирование сигнала;
Вход |
Передача |
|
Демодуляция |
|
Запись в регистри- |
Выходы |
|
по каналу |
|
|
|
рующее устройство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) передача сигнала и его регистрация;
Вход |
|
Выходы |
Фильтрация |
|
Масштабирование |
|
в) подготовка данных;
Вход |
Оценивание |
|
Оценивание |
|
Выработка управ- |
Выходы |
|
свойств |
|
связей между |
|
ляющего воздей- |
|
|
|
входными сиг- |
|
|
||
|
|
|
|
ствия |
|
|
|
|
|
налами |
|
|
|
|
|
|
|
|
|
г) анализ информации;
Рисунок 4.3. Последовательность операции обработки сигнала
61