

ЦСУ_Егоров
.pdfИмпульсная характеристика системы (звена) используется для по- лучения отклика системы на произвольный входной сигнал.
Покажем теперь, что в линейной системе с постоянными парамет- рами входная и выходная последовательности связаны соотношением типа
свёртки. |
|
|
|
Уравнением свёртки двух функций f1(t ) иf |
2 (t) называется выра- |
||
жение вида |
|
|
|
f (t ) = ∞∫ f (t −τ ) f |
|
(τ )dτ . |
(6.34) |
−∞1 |
2 |
|
|
Символически свёртка обозначается так |
|
||
f (t) = f1(t) f 2 (t), |
|
(6.35) |
|
и читается: "функция f1(t ) свёрнута с функцией f 2 (t)”.
Рассмотрим вычисление свёртки для дискретной последовательно- сти импульсов, определив связь между входной и выходной последова- тельностями.
Пусть на вход системы поступает последовательность
x[n] = ∑∞ x[m]δ [n − m], |
(6.36) |
m=0 |
|
где x[m]- ордината m-того элемента. |
|
Пусть k[n]является откликом системы с постоянными параметрами на единичный импульс 10[n], а k[n − m] будет откликом системы на сме-
щенный импульс 10[n − m]. Из свойств линейности следует, что откликом на произвольный импульс x[m]10[n − m]должна быть последовательность x[m]k[n − m]. Поэтому откликом на произвольную решётчатую функцию
x[n] будет сумма последовательностей |
|
y[n] = ∞∑ x[n]k[n − m]. |
(6.37) |
m=0 |
|
Выражение 6.41 имеет вид свёртки. Если сдвинуть начало отсчёта в точку m и учитывать только положительные значения этой переменной, что правомочно для реальных систем, то тогда уравнение свёртки будет представлено в следующем виде
y[n] = |
∞∑ x[n − m]k[m]. |
(6.38) |
|
m=0 |
|
Рассмотрим построение отклика системы на единичный ступенча- тый скачок 1[n], используя уравнение свёртки. Пусть система описывается разностным уравнением с постоянными параметрами
y[n] = 0.6 y[n −1]+ x[n − 2]. |
(6.39) |
112
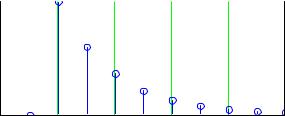
Подадим на вход системы единичный цифровой импульс и получим импульсную характеристику (рис. 6.9).
Затем подадим на вход системы три импульса, задержанных на 1, 2, 3 отсчёта и просуммируем отклики на эти импульсы (рис 6.10). При изме- нении задержки от 0 до ∞, получим отклик системы на единичный цифро- вой скачок.
Рассмотрим пример, выполненный в пакете Mathcad. Зададим чис- ловую последовательность x[n] состоящую из n=10 членов. Причем только x[2]=1, а остальные члены последовательности равны нулю.
n := 1 .. 10 x |
:= 0 |
x |
:= 0 |
x |
:= 0 |
x := 0 |
x9 := 0 |
|||
1 |
|
|
|
3 |
:= 0 |
5 |
|
7 |
||
x2 := 1 |
x4 |
x6 |
:= 0 |
x8 := 0 |
x10 := 0 |
|||||
|
|
|||||||||
yn−1 := 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yn := 0.6×y(n−1) + 1×xn |
|
(6.40) |
||||
Y[n] |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
2 |
4 |
6 |
8 |
10 |
n |
0 |
|
Рисунок 6.9 Импульсная характеристика
Реакцию системы на единичный ступенчатый скачек можно рас- сматривать как сумму сдвинутых последовательно на один отсчет им- пульсных характеристик.
Создадим последовательность, где три члена последовательности будут равны единице x[2], x[3], x[4], а остальные – нулю.
Откликом входной последовательности будет сумма откликов на каждый входной импульс.
113

n := 1 .. 10 |
x1 |
:= 0 |
|
x3 |
|
x5 |
:= 0 |
x7 |
:= 0 x9 := 0 |
|||||||||||
x2 |
:= 1 |
|
:= 1 |
|
|
|
||||||||||||||
yn−1 := 0 |
|
x4 |
:= 1 x6 |
:= 0 x8 |
:= 0 x10 := |
y1(n−1) := 0 |
||||||||||||||
|
|
|
|
0 |
xn = |
|||||||||||||||
yn := 0.6×y(n−1) + 1×xn |
|
|
|
|
|
|
Входной сигнал |
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yn := 0.6×y(n−1) + 1×xn |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||||
Y[n 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 n |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
2 |
|
|
4 |
6 |
|
|
8 |
|
|
0 |
|
||||||||
Рис. 6.10 Отклик системы на три единичных импульса
6.5. Автоматическое управление с использованием промышленных контроллеров
По принципу своего действия промышленный контроллер является устройством дискретного действия. Реализация программы обработки ин- формации осуществляется путем выполнения арифметических и некото- рых логических операций над кодами чисел: сложение, сравнение, пере- множение и т.д.
Для выполнения этих операций, а также операций кодирования и декодирования требуется время, поэтому ввод информации в промышлен- ный контроллер и вывод результатов решения производится в дискретные моменты времени.
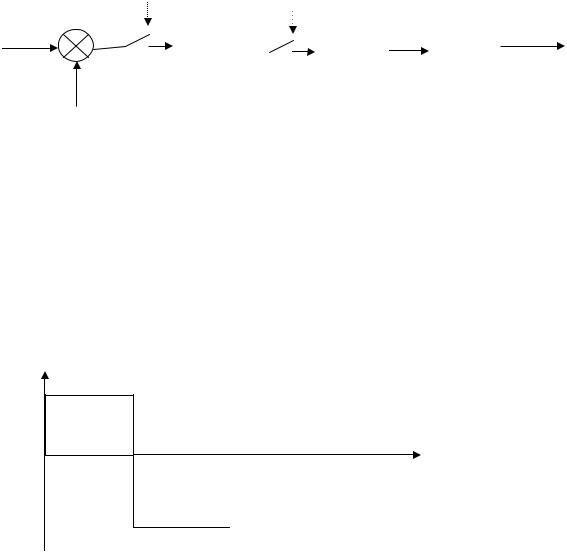
Операции кодирования и декодирования неизбежно связаны с кван- тованием сигнала по уровню. Однако при большом числе разрядов преоб- разователя непрерывного сигнала в код и кода в непрерывный сигнал квантованием по уровню можно пренебречь. В этом случае цифровая си- стема может исследоваться как обычная импульсная. Ее структурная схема может быть представлена как показано на рис. 6.11. На этой схеме переда- точная функция Д(z) отражает алгоритм обработки информации в цифро- вой вычислительной машине. Выходной сигнал промышленного контрол- лера может быть представлен импульсами прямоугольной формы с коэф- фициентом заполнения равным 1. Запоминание сигнала между импуль- сами моделируется звеном Wф(р) – фиксатором.[5]
114
Импульсный |
Алгоритм |
|
|
|
|
|
|
||||
Импульсный |
|
|
|
Объект |
|||||||
|
|
Импульсный |
|
|
U(z) |
|
|||||
элемент |
управления |
|
|
|
|
||||||
|
элемент |
|
|
|
управления |
||||||
|
|
|
элемент |
|
|
|
|
|
|||
|
|
|
|
|
|
|
фиксатор |
|
|
|
Y |
Хзад |
|
|
|
|
|
|
|
|
|||
|
|
|
σ (z) |
Д(z) |
|
|
Wф(р) |
|
Wо(р) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6.11 Упрощенная структурная схема цифровой автомати- ческой системы.
Прямоугольный импульс единичной высоты и длительности Т можно представить как сумму импульсов 1o(t) и 1o(t-T) как это показано на рис. 6.12
1(t)
Т
t
1(t-T)
Рисунок 6.12 Выходной сигнал звена Wф(р) – фиксатора
Передаточная функция фиксатора равна алгебраической сумме
изображений единичного ступенчатого воздействия |
1 |
и обратного сиг- |
|||
|
|||||
|
|
|
р |
||
нала сдвинутого во времени |
|
|
|
||
Wф( р) = |
1 − e− pt |
|
|
|
|
|
. |
(6.41) |
|||
p |
|||||
|
|||||
|
|
|
|
||
Другое название фиксатора – экстрополятор нулевого порядка.
115

В отличие от систем непрерывного действия динамические процес- сы в цифровых системах оказываются зависимыми от периода дискрети- зации Т.
Рассмотрим простейший разомкнутый контур (рис.6.13) с аналого- вым и цифровым регулятором, реализующим пропорциональный закон управления. Моделью объекта управления является апериодическое звено первого порядка.
Рассмотрим работу системы c аналоговым регулятором
Wo = |
|
Kоб |
, |
(6.42) |
|
+ Тоб р |
|
||
1 |
|
|||
Wp( p) = Kp , Kp = 1, Kоб = 1, Тоб = 2с |
(6.43) |
|||
и цыфровым регулятором:
Wp(z) = |
1 |
|
(6.44) |
z , |
|
||
|
|
||
Подадим на входы регуляторов гармонический входной сигнал:
Хвх(t) = A × sin(ωt) , |
(6.45) |
|||
где А=0,3, ω=3,14 1/с |
|
|
|
|
|
|
|
|
|
регулятор |
объект |
|
|
|
|
|
|
|
|
|
|
|
y1(t) |
|
|
|
|
|
|
|
|
|
|
|
X (t)
Генератор
|
|
|
|
y2(t) |
|
|
Дискретный |
|
|
|
|
|
|
|
|
|
|
|
Осциллограф |
|
|
|
|
|
|
||
|
объект |
|
|
|
||
регулятор |
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6.13 Структурная схема системы с аналоговым и цифровым регуляторами
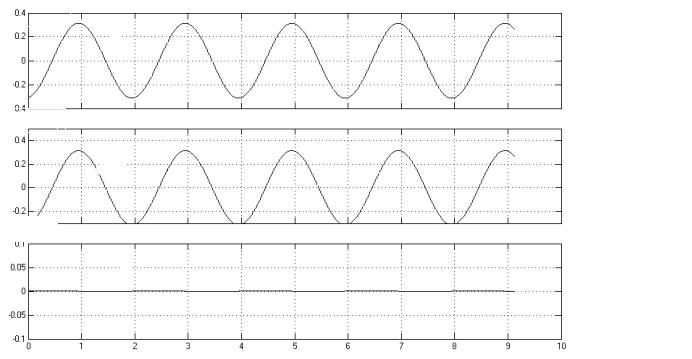
Промоделируем работу системы с цифровым регулятором. Период дискретизации Т1=0.05с, затем Т2=0.00005c. Для каждого из периодов дискретизации получены графики ошибки регулирования
σ(t) = y1 (t) − y 2 (t) (рис. 6.14-15).
116

Из графиков на рис. 6.14 рис. 6.15 видно, что для периода дискре- тизации значительно меньшего постоянной времени объекта управления цифровой регулятор с точки зрения математического описания может рас- сматриваться как непрерывный.
Рассмотрим замкнутые цифровые системы автоматического управ-
ления.
Наиболее часто замкнутые системы автоматического управления имеют параметрически-оптимизируемые регуляторы, реализующие П, ПИ или ПИД-регуляторы. Идеализированное уравнение ПИД регулятора име- ет вид:
U(t) = Kσ (t) + T |
t |
σ (t)dt + T |
dσ (t) |
|
|
∫ |
|
, |
(6.46) |
||
|
|||||
и |
0 |
д |
dt |
|
|
где введены следующие обозначения К- коэффициент передачи,
Ти- постоянная времени интегрирования, Тд- постоянная времени дифференцирования,
σ (t) - рассогласование сигнала задания и обратной связи на входе регулятора.
y1(t)
1
y2(t) |
2 |
t,c |
|
σ (t) |
3 |
t,c |
t,c
Рисунок 6.14 Величина ошибки регулирования в цифровой системе при Т1=0,05 с равна σ max = 5%
117
y1(t)
1
|
|
|
t,c |
|
yy(t)2 2(t) |
|
|
|
|
|
|
|
|
|
2 |
t,c
σ (t)
3
t,c
Рисунок 6.15 Величина ошибки регулирования в цифровой системе при Т1=0,00005 с равна σ max ≈ 0.
1.Выходной сигнал непрерывного контура.
2.Огибающая выходного сигнала цифрового контура.
3.Ошибка
Для малых тактов дискретизации, (Т<<То) когда время управляю- щего импульса значительно меньше постоянной времени непрерывной ча- сти системы, уравнение ПИД-регулятора можно преобразовать в разност- ное заменой производной разностью первого предела:
y[n] = |
y[n] − y[n − 1] |
(6.47) |
|
, |
|||
T |
|||
|
|
Непрерывное интегрирование может быть замечено интегрировани- ем по методу прямоугольников и трапеций. При использования метода прямоугольников получаем
Up[nT ] = K |
|
σ [nT ] +T |
× |
k |
σ [mT ] +Т |
|
(σ [nT ] -σ [n -1]) , |
|
|
p |
∑ |
|
(6.48) |
||||||
|
и |
|
m=o |
|
|
д |
Т |
|
|
Уравнение (6.48) реализует |
нерекурентный алгоритм управления. |
||||||||
В этом случае для формирования суммы необходимо помнить все преды- дущее значение сигнала σ [nT ]. Для программирования на ЦВМ долее
118
удобны рекуррентные алгоритмы. Эти алгоритмы отличаются тем, что для вычисления текущего значения управляющей переменной Uр[n] исполь- зуются ее предыдущие значения Up[n-1].
Для получения дискретного алгоритма достаточно из выражения (6.48) вычесть выражение для управляющего воздействия на предыдущем такте
Up[(n -1)T ] = K р ×[σ[(n -1)T ] + |
|
||||
+Т |
k-1 |
σ[(m -1)T ] +Т |
|
[σ[(n -1)T ] -σ (n - 2)] |
(6.49) |
∑ |
|
||||
|
и m=0 |
|
д |
T |
|
Теперь к полученному ранее значению управляющей величины до- бавляется текущее приращение
Up [ nT ] = Up [ nT ] − Up [( n − 1)T ] . |
(6.50) |
Рассмотрим преобразование передаточных функций непрерывных звеньев в дискретные
Получим преобразование Лапласа импульсного сигнала |
выходной |
||
на выходе звена |
∞ |
|
|
D{y[nT ]}= |
(6.51) |
||
∑ y[nT ]× e-nTp |
|||
|
n=0 |
|
|
Для этого представим выходной сигнал как уравнение свертки входного сигнала и импульсной характеристики
y[nT ] = ∞∑ x[nT ]× k[(n - m)T ] |
|
(6.52) |
||
m=0 |
|
|
|
|
Тогда получим: |
|
|
||
D{y[nT ]}= |
∞ |
∞ |
- m)T ]× e−nTp |
(6.53) |
∑ |
∑ x[nT ]× k[(n |
|||
|
n=0 m=0 |
|
|
|
Подставим в эту формулу новую переменную g=n-m |
|
|||
D{y[nT ]}= |
∞ |
∞ |
|
(6.54) |
∑ |
∑ x[nT ]× k[gT ]× e-gTp × e−mTp |
|||
|
m=0 g=0 |
|
|
|
D{y[nT ]}= |
∞ |
k[gT ]×e−gTp × |
∞ |
(6.55) |
∑ |
∑ x[nT ]×e−mTp |
|||
|
g=o |
m=o |
|
|
119
Выражение |
∞∑ x[nT ]× e−mTp представляет изображение входного |
сигнала D{y[nT ]}. |
m=o |
|
Последнее выражение (6.55) можно представить как изображение импульсной переходной характеристики и изображение входного сигнала.
Запишем дискретную передаточную функцию звена:
W[ p] = |
D{y[nT ]} |
|
= |
∞∑k[gT ]×e−gTp |
(6.56) |
|
D{x[nT ]} |
||||||
|
|
g=o |
|
|||
Переходя к переменной z = eTp , получим дискретную передаточ- ную функцию:
W (z) = |
y(z) |
= |
∞∑ k[gT ]× z -g . |
(6.57) |
|
||||
|
x(z) |
g=o |
|
|
Используем выражение дискретной передаточной функции для преобразования передаточной функции непрерывного звена в дискретную.
Возьмем для примера апериодическое звено первого порядка с пе- редаточной функцией:
W ( p) = |
|
|
K |
= |
|
b |
, |
(6.58) |
|
|
|
|
|
|
|
||||
1+ Tоб × p |
a + p |
||||||||
где a = |
|
1 |
, b = |
K |
|
|
|
||
|
|
Tоб |
|
|
|||||
|
Tоб |
|
|
||||||
Импульсная переходная функция этого звена |
|
||||||||
k (t) = b × e−αt , |
|
|
|
|
(6.59) |
||||
где α корень характеристического уравнения. |
|
||||||||
Перейдем к дискретному времени t = nT . Тогда импульсная |
пере- |
||||||||
ходная характеристика будет иметь вид |
|
||||||||
k[nT ] = b × e−αnT . |
|
|
|
|
(6.60) |
||||
Выполним дискретные преобразования импульсной переходной ха- |
|||||||||
рактеристики |
|
∞ |
|
|
|
|
|
||
W ( p) = |
|
|
|
|
|
(6.61) |
|||
|
∑b ×e-αnT × e-gTp , |
||||||||
|
|
g =0 |
|
|
|
|
|
||
W ( p) = |
|
∞ |
|
|
|
|
(6.62) |
||
|
∑b ×e-αT × emTp , |
||||||||
|
m=0 |
|
|
|
|
|
|||
120
W (z) = |
∞ |
b × e-αT × z |
-m = |
b × z |
|
||
∑ |
|
|
. |
(6.63) |
|||
z - e |
-αT |
||||||
|
m=0 |
|
|
|
|
||
Обозначим - e −αT через a и разделим числитель и знаменатель на |
|||||||
|
|
|
|
|
|
|
1 |
Z получим |
|
|
|
||||
W (z) = |
|
b |
|
|
(6.64) |
||
|
|
|
|
|
|||
1 + a z-1 |
|
|
|||||
1 |
|
|
|
|
|||
Вычислим параметры этой передаточной функции, например, при |
|||||||
К=1, Tоб = 7.5 с, Т=4с. |
|
|
|
||||
b = |
K |
= 0.1333 |
a |
|
= -e −αT = -0.5866 |
||
|
1 |
||||||
Tоб |
|
|
|||||
Графики переходных процессов апериодического звена и дискрет- |
|||||||
ного приведены на рис. 6.18.
Как видно из расчета параметров дискретной передаточной функ- ции и графиков, период дискретизации Т, соизмерим с постоянной време- ни. Существенно влияет на расхождения между кривой переходного про- цесса непрерывного звена и дискретного.
Графики переходных процессов апериодического звена (кривая 1) и дискретного (кривая 2) приведены на рис. 6.16.
y(t)
2
1
t
Рисунок 6.16. Графики переходных процессов апериодического звена первого порядка и дискретного
Если период дискретизации соизмерим с большой постоянной вре- мени объекта управления, то расчет цифрового регулятора представляет собой довольно сложную задачу. Однако современные промышленные контроллеры имеют довольно высокое быстродействие и целесообразно воспользоваться методами расчета аналоговых регуляторов [2]. В пакете Matlab программа Sisotool позволяет рассчитывать регуляторы методом амплитудно-частотных характеристик. В этом же пакете полученная пере- даточная функция регулятора непрерывного действия довольно просто преобразуется в дискретную.
121