

5. Фундаментальные принципы управления
Все многообразие систем управлении основано на трех фундаментальных принципах. Эти всеобщие принципы применяют для управления не только техническими, но и любыми другими объектами: биологическими, социальными, интеллектуальными и др.
Фундаментальные принципы различаются видом исходной информации и способом ее использования для управления объектом.
5.1. Принцип разомкнутого управления (по заданному значению)
Принцип разомкнутого управления состоит в том, что управляющее воздействие v(t) вырабатывается автоматическим устройством (АУ) на основании информации только о заданном значении g(t) – уставке величины y(t)
v = (g). (5.1)
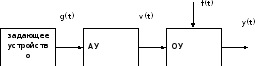
Рис. 5.1. Схема разомкнутого управления
Схема управления при этом имеет вид разомкнутой цепочки (рис. 5.1), в которой автоматическое (управляющее) устройство приводится в действие специальным задающим устройством (задатчиком) и воздействует на объект управления так, чтобы значение управляемой величины было равно или близко к заданной.
Как видим, алгоритм управления не увязан ни с выходом объекта, ни с возмущениями, действующими на него. Разомкнутая цепь далеко не всегда обеспечивает требуемую точность выполнения алгоритма функционирования, особенно при значительных возмущениях, под действием которых выходная величина может заметно отклониться от заданной.
В качестве примера использования рассматриваемого принципа можно рассмотреть такое управление нагревательной печью, при котором по известной методике рассчитывают расход газа, обеспечивающий при некоторых заданных (базовых) параметрах процесса (давление в газопроводе, теплотворная способность газа, температура подаваемого воздуха и т.п.) достижение требуемой температуры в печи.
Затем устанавливают запорную арматуру на газопроводе в положение, соответствующее этому расчетному значению. На этом процесс управления заканчивается. Очевидно, что любое отклонение параметров процесса нагрева от базовых значений приведет к соответствующему отклонению температуры печи от заданной.
И все же, несмотря на очевидные недостатки, разомкнутое управление, благодаря своей простоте, используется достаточно широко для решения простых задач автоматизации (сигнализация, контроль, пуск и остановка агрегатов). По разомкнутому циклу работают торговые автоматы, автоматические станочные линии и др.
Общим для таких систем является то, что выполнение заданий не контролируется, возмущения не измеряются и не используются для выработки управляющих воздействий.
5.2. Принцип обратной связи (управление по отклонению)
Этот принцип является одним из наиболее ранних и широко распространенных принципов управления. В соответствии с ним управляющее воздействие v(t) вырабатывается в автоматическом устройстве как функция отклонения (t) регулируемой величины y(t) от заданного значения g(t)
v = (), (5.2)
(t) = g(t) – y(t).

Рис. 5.2. Схема управления по отклонению
Использование информации с выхода объекта управления для формирования управляющего воздействия называется обратной связью. Поскольку знак рассогласования (t) противоположен знаку (t) такая обратная связь называется отрицательной. На рис. 5.2 эта связь показана стрелкой, направленной с выхода ОУ на вход АУ, а кружком, разделенным на секторы, показан сумматор. Стрелки, подходящие к секторам, обозначают слагаемые, стрелка, отходящая от одного из секторов – сумму. Слагаемые, вводимые в сумматор с обратным знаком (вычитаемые), отмечаются знаком «-» у вершины стрелки.
Достоинством принципа обратной связи является его высокая точность. Почти всегда можно отыскать такую функцию (5.2), которая обеспечит достаточно точное совпадение выходной величины с заданным значением (аргументами могут быть также производные или интегралы по времени).
В то же время управление по отклонению обладает и серьезным принципиальным недостатком. Он проявляется в том, что управление всегда “немного запаздывает”. В системах, построенных на этом принципе, выходная величина сначала должна отклониться от задания, а уже потом регулятор приведет ее к нужному значению.
От указанного недостатка свободен следующий принцип управления – принцип компенсации.