

VIII. Классификация уровней асу
По степени сложности и соподчинению системы управления делятся на автоматизированные системы управления технологическими процессами (АСУ ТП) и автоматизированные системы управления производством (АСУП).
При этом, первый уровень составляют средства получения и преобразования информации, второй и третий – локальные регулирующие устройства, четвертый – средства для централизованного управления и последний, пятый уровень – АСУП.
По структуре как АСУ ТП, так и АСУП делятся на две группы:
Централизованные – в которых управление регулирующими органами на объекте управления осуществляется непосредственно от управляющей ЭВМ.
Распределенные – в которых УВМ выдает задание локальным системам автоматического регулирования отдельных параметров, обеспечивающим оптимальный режим работы объекта управления.
Приведенная классификация систем управления свидетельствует о большом разнообразии методов и средств автоматического управления. Выбор той или иной системы определяется требованиями совершенствования технологии и целями управления производственными процессами.
4. Переходные процессы и оценка их качества
4.1. Статическое и динамическое состояние систем
В статическом состоянии возмущающие и управляющие воздействия на систему постоянны. Если при этом значение регулируемого параметра равно заданной величине, то говорят об установившемся режиме работы системы управления.
Зависимость между выходными У и входными Х величинами в установившихся режимах работы (рис. 4.1) называется статической характеристикой системы. Статические характеристики дают возможность оценить характер и степень связи между входными и выходными величинами.
Рис. 4.1. Вид статических характеристик объектов:
а – с одним выходом; б – с несколькими выходами;
линейная
(1) и нелинейная (2) характеристики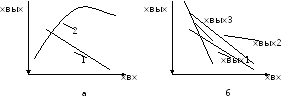
На практике статические режимы весьма редки, так как многочисленные возмущения постоянно выводят систему из состояния равновесия. Режим, отличный от статического, называют динамическим, а переход во времени от исходного установившегося состояния к новому называется переходным процессом.
Можно выделить следующие виды переходных процессов в системах управления.
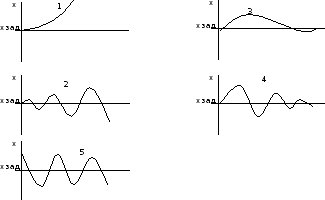
1 – апериодический переходной процесс в неустойчивой системе;
2 – колебательный переходной процесс в неустойчивой системе;
3 – апериодический переходной процесс в устойчивой системе;
4 – колебательный переходной процесс в устойчивой системе;
5 – процесс с незатухающими (стационарными) колебаниями.
4.2. Типовые воздействия на объект
Переходной процесс в системе управления может начаться либо под влиянием возмущающих воздействий, либо вследствие изменения задающего воздействия (т.е. при настройке системы на новое заданное значение выходной величины).
Для сравнения различных систем или оценки их пригодности для решения конкретных задач управления рассматривают их поведение в динамике. Вид переходного процесса зависит не только от свойств собственно системы, но и от характера изменения приложенных воздействий. Поэтому в рассмотрение вводят типовые воздействия, которые являются наиболее неблагоприятными или наиболее характерными среди всех возможных.
1) Наиболее часто в качестве типового воздействия используют скачкообразные функции, например, ступенчатое воздействие – единичный скачок (рис. 4.2, а)
 .
(4.1)
.
(4.1)
Такой сигнал является характерным для систем автоматической стабилизации. Например, при регулировании скорости и натяжения прокатываемой на стане полосы скачкообразные воздействия могут возникать при внезапном включении (отключении) системы управления.
2) Другим типовым воздействием является импульсное (рис. 4.2, б). Это воздействие возникает в системах с резким и значительным изменением нагрузки за время, значительно меньшее времени переходного процесса.
В качестве примера можно указать на следящую систему, предназначенную для управления летучими ножницами в прокатном стане при разрезании раската на полосы.
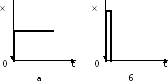
Рис. 4.2. Типовые воздействия
3) Для систем, работающих в условиях периодических возмущений, используют гармонические типовые воздействия. Получаемые при этом частотные характеристики позволяют наиболее полно оценить динамические свойства системы.