

6.3.3 Идеальное интегрирующее звено
В таком звене выходной сигнал пропорционален интегралу от входной величины. Это свойство звена описывается выражением
или
 .
.
Преобразуем последнее выражение по Лапласу – р у = k1 х. Тогда передаточная функция звена имеет вид – W(p) = k1 / p .
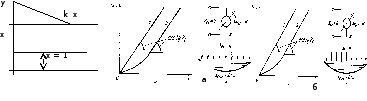
Переходная характеристика звена h(t) = k1 t представляет собой прямую линию с углом наклона = arctg k1 (рис. 6.5, а).
Примеры интегрирующих звеньев (рис. 6.5, б):
а) электродвигатель, если входная величина – напряжение питания U, а выходная величина – угол поворота якоря ,
б) ванна жидкого
металла в сталеплавильной печи, если
входная величина – тепловой поток через
поверхность ванны q,
а выходная величина – изменение средней
температуры металла tм.
а б
Рис. 6.5. Интегрирующее звено:
а – переходная характеристика, б – примеры интегрирующих звеньев
6.3.4 Реальное интегрирующее звено (интегрирующее звено с замедлением) описывается дифференциальным уравнением
 .
.
Передаточная функция звена W(p) = k1 / p (Tp + 1).
Переходная характеристика реального интегрирующего звена h( ( e)) отличается от переходной функции идеального звена в начальный момент времени, а затем переходит в параллельную ей прямую линию с тем же углом наклона = arctg k1 (рис. 6.6).
.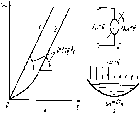
Рис. 6.6. Сравнительные переходные характеристики идеального (1) и реального (2) интегрирующих звеньев
Примерами реальных интегрирующих звеньев могут служить те же объекты (см. рис. 6.5), если более точно рассматривать их уравнения движения. Например, электродвигатель с постоянной скоростью вращения будет идеальным интегрирующим звеном. Однако в момент пуска постоянная скорость вала установится не сразу, а с некоторым замедлением и, поэтому, электродвигатель следует рассматривать как реальное интегрирующее звено.
6.3.5 Идеальное дифференцирующее звено
Дифференциальное
уравнение звена
 ,
,
где
 – время дифференцирования звена, имеющее
размерность единицы выходной величины,
деленную
на единицу
скорости изменения входной величины.
– время дифференцирования звена, имеющее
размерность единицы выходной величины,
деленную
на единицу
скорости изменения входной величины.
Передаточная функция звена W(p) = ТД p.
Переходная характеристика звена h (t) = ТД (t)
Здесь (t) – так называемая дельта-функция – мгновенный импульс бесконечно большой амплитуды.. Поєтому переходная характеристика идеального звена представляет собой бросок выходной величины в бесконечность в момент нанесения ступенчатого входного воздействия (рис. 6.7, а).

а б
Рис. 6.7. Пример дифференцирующего звена
Наиболее близко к идеальному звену приближается тахогенератор постоянного тока, если входной величиной считать угол поворота якоря, а выходной – э.д.с. якоря (рис. 6.7, б).
6.3.6 Реальное
дифференцирующее звено
(дифференцирующее звено с замедлением)
описывается дифференциальным уравнением  .
.
Передаточная функция звена W(p) = ТД p / (Tp +1).
Переходная характеристика звена h (t) = ( k / T ) e – t / T представляет собой экспоненту, касательная к которой в начальной точке отсекает на нулевом значении выходной величины постоянную времени Т.

Рис. 6.8. Переходные функции идеального (1) и реального (2)
дифференцирующего звеньев