

6.3.7 Звено чистого запаздывания
В отличие от других звеньев, это звено описывается уравнением с запаздывающим аргументом (t – ), где – время чистого запаздывания у (t) = х (t – ),
Форма сигнала при этом не меняется, он просто смещается во времени.
Передаточная функция этого звена имеет вид – W(p) = k exp(– p t) , а переходная функция – h(t) = k (t – ).
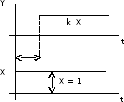
Рис. 6.9. Переходная характертистика звена чистого запаздывания
Характерным примером звена чистого запаздывания служит транспортер (например, лента агломерационной машины), на котором после изменения входной величины (толщина слоя сыпучего материала) должно пройти время 0 = l/v ( l – длина транспортера; v – его скорость; 0 – время чистого транспортного запаздывания), после которого таким же образом изменится выходная величина.
1
Рис. 6.10. Пример звена чистого запаздывания
6.4 Класификация динамических звеньев второго порядка
Дифференциальные уравнения таких звеньев имеют общий вид
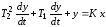 ,
,
а передаточная функция – W(p) = K / (T22 p2 + T1 p + 1).
В зависимости от соотношения постоянных времени Т1 и Т2 :
а) Если
 ,
то звено называется апериодическим
второго порядка. Переходной процесс
представляет собойS-образную
кривую с перегибом в точке О (рис. 6.10).
,
то звено называется апериодическим
второго порядка. Переходной процесс
представляет собойS-образную
кривую с перегибом в точке О (рис. 6.10).

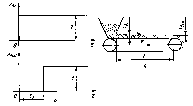
Рис. 6.10. Переходная характеристика апериодического звена
Примеры апериодических звеньев второго порядка (рис. 6.11):
а) последовательное соединение двух пневматических емкостей, если входная величина х = Рпит, а выходная величина – давление во второй емкости у = Р ;
б) двойная электрическая RC–цепочка.
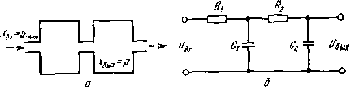
Рис. 6.11. Примеры апериодических звеньев второго порядка
б) Если
 ,
то звено называется колебательным.
,
то звено называется колебательным.
Дифференциальное уравнение звена обычно представляется в виде
 ,
,
где – коэффициент затухания, 0 < < 1. При этом корни характеристического уравнения комплексные.
Переходная характеристика звена представляет собой периодический сходящийся процесс (рис. 6.12), описываемый формулой
 ,
,
где
=
/ T,
 .
.
Примерами колебательных звеньев могут служить (рис. 6.13):
а) электрический колебательный RCL–контур (R – активное сопротивление, C – емкость, L – индуктивность);
б) упругая механическая передача, которая состоит из входного 1 и выходного 2 валов, упругого элемента 3, маховика 4 и демпфера 5, оказывающего сопротивление вращению вала. Входная величина х – угол поворота входного вала 1, выходная величина у – угол поворота выходного вала 2.

Рис. 6.12. Переходная характеристика колебательного звена
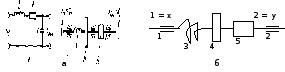
Рис. 6.13. Примеры колебательных звеньев
в) Если Т1 = 0, то есть нет демпфирования, имеем консервативное звено –
 .
.
Переходная характеристика представляет собой гармонические незатухающие колебания (в природе такого звена нет).
г) Если Т1 < 0 – это неустойчивое колебательное звено.
Классификацию динамических звеньев второго порядка можно графически изобразить таким образом (рис. 6.14).
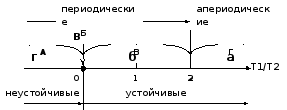
Рис. 6.14. Классификация динамических звеньев второго порядка