

6.3 Динамические звенья первого порядка
Типовые динамические звенья первого порядка подразделяются на статические, астатические, дифференцирующие и звено чистого запаздывания.
К статическим относятся такие звенья, которые при ступенчатом входном воздействии переходят из одного положения равновесия в другое.
6.3.1 Пропорциональное звено
Это звено называют также усилительным и безынерционным. Звено описывается алгебраическим уравнением y = k x ,
где k – коэффициент передачи (усиления), имеющий размерность единицы выходной величины y, деленную на единицу входной величины x
 .
.
Передаточная функция пропорционального звена равна его коэффициенту передачи – W(p) = k.
Переходная
характеристика выглядит следующим
образом (рис. 6.1).
Рис. 6.1. Переходная характеристика пропорционального звена
Усилительное звено не трансформирует форму входного сигнала, а изменяет только его масштаб в k раз.
Примерами пропорциональных звеньев могут служить (рис. 6.2):

Рис. 6.2. Примеры пропорциональных звеньев
а) рычаг, если входная величина х – усилие на одном конце рычага, а выходная величина у – усилие на другом его конце (рис. 6.2,а);
б) зубчатая передача, если х = вх – угол поворота малой шестерни, а у = вых – угол поворота большой шестерни (рис. 6.2,б);
в) теплоотдача конвекцией от движущегося газа к стенке, если х –разность температур газа и стенки t = tГ – tСT, а у – количество отдаваемого тепла Q (рис. 6.2,в);
г) потенциометрический датчик измерительного прибора, если х – перемещение движка l, a у – снимаемое с датчика напряжение Uвых (рис. 6.2,г).
6.3.2 Апериодическое (инерционное) звено первого порядка
Динамика этого
звена описывается дифференциальным
уравнением
 ,
,
где k – коэффициент передачи; Т – постоянная времени, с.
Передаточная функция звена W(p) = k / (Tp+1).
Переходная характеристика звена h(t) = k (1 – e – t / T). Таким образом, звено накапливает энергию или вещество и, благодаря этому, Y принимает свое значение через время
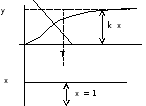
Рис. 6.3. Переходная характеристика инерционного звена
На графике переходной функции (рис. 6.3) отрезок, отсекаемый касательной, проведенной в начальной точке, при установившемся значении выходной величины равен постоянной времени Т.
Следовательно, постоянная времени – это время, за которое выходная величина достигла бы своего установившегося значения, если бы изменялась с постоянной начальной скоростью. Чем больше Т, тем длительнее переходный процесс. Практически переходный процесс считается закончившимся через время 3 Т.
Примерами апериодических звеньев могут служить:
а) электропривод постоянного тока, если входная величина х подводимое напряжение и, а выходная величина у – скорость вращения n;
б) промежуточный ковш МНЛЗ, если х = Gпр – Gот – баланс поступления и расхода жидкого металла, а у – уровень металла Н;
в) нагрев тела, помещенного в среду с температурой tc (теплоотдача оценивается по закону Ньютона q = (tc – tм), где q – плотность теплового потока на нагреваемое тело; – коэффициент теплоотдачи), если tc – входная величина, а средняя температура тела tм – выходная величина;
г) электрическая RC-цепочка, если Uвх = х, а Uвых = у.
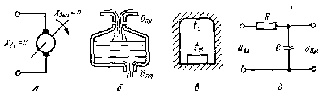
Рис. Примеры апериодических звеньев первого порядка
Рис. 6.4. Примеры инерционных звеньев
Астатические (интегрирующие) звенья – это такие звенья, у которых после поступления на вход ступенчатого воздействия выходная величина не приходит к установившемуся значению (как у статических), а непрерывно изменяется.