

III. По виду математического описания
Линейные системы описываются линейными дифференциальными уравнениями. Для линейных систем справедлив принцип суперпозиции. Реакция системы на любую комбинацию внешних воздействий равна сумме ее реакций на каждое из этих воздействий в отдельности.
Это позволяет выразить реакцию системы на любое сложное воздействие через последовательность ее реакций на простые воздействия. Благодаря этому принципу и была разработана общая теория линейных САУ.
Однако практически все реальные системы нелинейны, поскольку чтобы система стала нелинейной достаточно иметь в ее составе хотя бы одно нелинейное звено.
Нелинейные системы описываются нелинейными уравнениями, которые в общем виде не решаются. Поэтому для получения аналитического решения, описывающего поведение таких систем, прибегают к линеаризации – замене нелинейных зависимостей линейными приближениями, которые не слишком искажают реакцию реальных САУ.
Стационарной называют САУ, все внутренние параметры которой постоянны. В нестационарной системе ее параметры являются функциями времени. Поэтому реакция такой САУ на одно и то же воздействие зависит от момента его приложения. Например, СУ полетом ракеты, масса которой изменяется по мере расхода топлива.
IV. По виду сигналов
В зависимости от вида входных и выходных сигналов различают непрерывные и дискретные системы.
В непрерывных (аналоговых) системах все сигналы представляют собой непрерывные функции времени. Часто для передачи информации используются гармонические сигналы, модулированные по амплитуде, частоте или фазе
y = А sin (ω t + φ).
Дискретная система содержит хотя бы одно звено дискретного действия, выходная величина Y которого изменяется дискретно (скачками) даже при плавном изменении входных величин X.
Если скачки Y происходят при прохождении Х определенных пороговых значений (квантование по уровню на рис. 3.1) – имеем релейные системы.
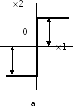
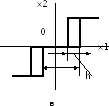
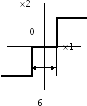
Рис. 3.1. Примеры релейных характеристик:
а – обычные; б – с зоной нечувствительности ;
в - с зоной нечувствительности и гистерезисом h.
Если скачки Y происходят через определенные интервалы (дискретизация по времени) получаем импульсные системы. В технике автоматического управления для передачи информации широко используется амплитудная, широтная или частотная модуляция.
В кодово-импульсных системах квантование сигналов осуществляется как по времени, так и по уровню. К этому большому классу АСУ относятся и цифровые системы – ЭВМ и микропроцессоры, в которых информация о параметрах объектов циркулирует в виде числовых кодов.
В комбинированных системах аналоговые и дискретные сигналы взаимно преобразуются.
V. По методу управления
Обыкновенные системы не изменяют своих свойств во время эксплуатации. В этих системах не учитываются изменения, происходящие в объекте управления и в производственных условиях.
Для достижения целей управления регулятор может не только вырабатывать управляющие воздействия на объект, но и изменять свои настройки, законы регулирования и, даже, структуру,. При этом меняются свойства системы управления в целом.
Адаптивные системы могут изменять свои свойства в процессе эксплуатации, приспосабливаясь к изменениям условий работы объекта.
На основе анализа результатов управления объектом в самонастраивающихся системах корректируются настройки автоматических регуляторов, а в самоорганизующихся – и сама структура системы.
В игровых системах моделируются варианты управления с учетом возможных реакций объекта. При этом используется набор шаблонных решений задач управления и/или поиск оптимальной стратегии управления методом проб и ошибок.
Область применения адаптивных и игровых систем – управление сложными динамичными стохастическими объектами.