

5.3. Принцип компенсации (управление по возмущению)
Сущность этого принципа (рис. 5.3) состоит в том, что управляющее воздействие v(t) вырабатывается АУ по информации об отклонении f(t) текущего значения возмущения f(t) от его ожидаемого (базового) значения f*(t) v = (f) , (5.3) f(t) = f*(t) – f(t) .

Рис. 5.3. Схема управления по возмущению
Другими словами, управление вырабатывается в функции возмущения так, чтобы действие последнего на систему компенсировалось («упреждающее управление»).
Системы регулирования по возмущению обычно отличаются от систем с обратной связью большей устойчивостью и быстродействием.
Недостатки же принципа компенсации связаны с трудностями, которые возникают при измерении большинства возмущений, и, как следствие, с невозможностью их учета в полном объеме.
Важно отметить, что для реализации управления по возмущению необходимо располагать математической моделью объекта, т.е. зависимостями, связывающими выходную величину с возмущениями и с управляющим воздействием, отсутствие которых зачастую ограничивает применение данного принципа.
5.4. Пример реализации принципов управления
Для большей наглядности рассмотрим сущность описанных принципов на примере управления температурой в печи с электронагревателем (рис. 5.4). Допустим, что печь имеет малые размеры и температура Т в печи в любой момент одинакова.
Управляемой величиной является средняя температура Тср, а управляющей – сила тока J в электронагревательном элементе. Возмущающими воздействиями являются колебания напряжения в сети Uс (основное возмущение), изменения сопротивления нагревательного элемента R, изменения теплоемкости и теплопроводности печи, также изменения температуры окружающей среды Тср.
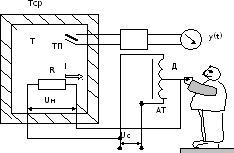
Рис. 5.4. Система автоматического управления температурой печи с электронагревателем
1) В разомкнутой системе управления оператор задает уставку силы тока Jзад в соответствии с инструкцией.
2) В компенсирующей системе управления (рис. 5.4, а) оператор не получает информации о температуре в печи Т, но он знает, как изменится величина Т при определенном изменении напряжения в сети Uс. Измеряя величину Uс, он передвигает движок Д автотрансформатора АТ и устанавливает требуемое значение напряжения Uн, компенсируя тем самым влияние возмущающего воздействия.
3) В системе с обратной связью (рис. 5.4, б) при помощи термометра с термопарой ТП и усилителя УС измеряется управляемая величина – температура в печи Т. Если величина Т меньше требуемой Тзад , то оператор увеличивает напряжение Uн , и наоборот. Здесь для формирования управляющего воздействия используется отклонение текущего значения величины Т от требуемого значения Тзад.
4) Для объединения достоинств двух последних принципов их реализуют одновременно. В комбинированных системах имеется два канала регулирования: канал регулирования по отклонению и канал регулирования по возмущению (рис. 5.5). В каждом канале имеется свой регулятор. Естественно, конструкция комбинированных систем сложнее, а стоимость выше.
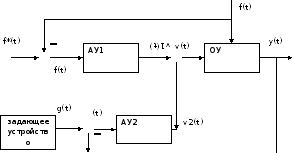
Рис. 5.5. Комбинированная система управления