

5.5. Обыкновенные и адаптивные системы
Для достижения цели управления регулятор может не только вырабатывать управляющие воздействия на объект, но и изменять свои собственные свойства: параметры, структуру, закон регулирования. При этом меняются свойства системы в целом. Имеются в виду так называемые контролируемые или предусмотренные изменения, а не такие, которые происходят из-за случайных ошибок измерения, старения элементов и т.п.
Обыкновенные системы не изменяют своих свойств во время эксплуатации. Их свойства назначаются в процессе проектирования, исходя из некоторых типовых или наиболее вероятных условий работы и сохраняются неизменными при отклонении реальных условий от предусмотренных при проектировании. Следовательно, процесс управления, являющийся оптимальным для предусмотренных условий, не является таковым для непредусмотренных случаев. В таком случае перенастройку системы должен производить человек.
Приспосабливающиеся или адаптивные системы обладают способностью самостоятельно улучшать свои свойства в процессе эксплуатации. Если система автоматически изменяет свои параметры – ее называют самонастраивающейся, а если дополнительно она изменяет и свою структуру – имеем самоорганизующуюся систему.
Область применения адаптивных САУ – управление объектами, свойства и условия работы которых недостаточно известны или очень динамичны.
5.6. Оптимальные системы
Оптимальные САУ – это системы, в которых обеспечивается оптимальное значение основного показателя качества работы системы, например, длительность переходного процесса, точность отработки управляющего воздействия или минимизация потребляемой мощности объекта управления. В ряде технологических процессов показатель качества, или эффективность, выражается в каждый момент времени функцией характеристик системы. Эта функция может быть представлена в виде многомерной поверхности в фазовом пространстве параметров. При этом управление может считаться оптимальным, если оно обеспечивает удержание показателя качества в точке экстремума.
Эта точка под воздействием различных возмущений может смещаться в каком-то определённом направлении, но при этом неизвестно, в каком именно направлении следует воздействовать на регулирующий орган, чтобы вернуть систему к экстремуму. Обычно для осуществления экстремального управления выполняются сначала небольшие пробные движения, затем анализируется реакция на них системы и, по результатам анализа, вырабатывается управляющее воздействие.
Рис.
5.6. Схема оптимального управления с
поиском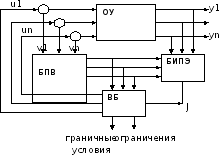
На рисунке приведена функциональная схема оптимального управления с поиском. Блок измерения показателя эффективности БИПЭ, измеряющий параметры процесса и вычисляющий по ним показатель качества J = f (y1,…,yn), подключен к выходу объекта управления ОУ. Блок пробного воздействия БПВ генерирует пробные воздействия V i на регулирующие органы РО. Вычислительный блок ВБ, получая информацию как о граничных условиях, различных ограничениях на параметры и введенных воздействиях, так и об изменении под их влиянием J, вырабатывает необходимые воздействия U i.