

П.Т.М. [учебное пособие]
.pdfМИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА РФ Федеральное государственное образовательное учреждение высшего профессионального образования
«Пермская государственная сельскохозяйственная академия имени академика Д.Н. Прянишникова»
Кафедра деталей машин
В.С. Новосельцев, В.Ф. Миллер, Ю.А. Барыкин
ПОДЪЕМНО-ТРАНСПОРТИРУЮЩИЕ
МАШИНЫ
Учебное пособие
ПЕРМЬ ФГОУ ВПО «Пермская ГСХА»
2010
УДК Б 21.86.001.Б 3 (075.8)
Рецензент: кандидат технических наук, доцент М.А. Трутнев
Подъемно-транспортирующие машины. Учебное пособие/ К.т.н., доцент В.С.Новосельцев (части 1.1-1.9, 2), к.т.н., доцент В.Ф.Миллер (части 1.6, 1.8), ст. преподаватель Ю.А.Барыкин (часть 3). М-во с.-х. РФ, ФГОУ ВПО «Пермская ГСХА». – Пермь: Изд-во ФГОУ ВПО «Пермская ГСХА»,
2010. – 119 с.
Учебное пособие «Подъемно-транспортирующие машины» предназначено для студентов третьего, четвертого курсов инженернотехнических специальностей очной и заочной форм обучения: 110301 «Механизация сельского хозяйства», 190603 «Сервис транспортных и технологических машин и оборудования (в автомобильном транспорте)», 110304 «Технология обслуживания и ремонта машин в АПК», 280101 «Безопасность жизнедеятельности (в техносфере)».
В предлагаемом пособии изложены методические рекомендации и представлены нормативные материалы, необходимые для выполнения курсовой работы, даны примеры расчетов, выдержки из каталогов и стандартов на основные узлы и детали грузоподъемных и транспортирующих машин.
Учебное пособие рассмотрено и утверждено методической комиссией факультета технического сервиса 25. 01. 2010 г. (Протокол № 4)
© ФГОУ ВПО «Пермская ГСХА», 2010
Cодержание
Введение |
4 |
1. Проектирование и расчет механизмов подъема |
|
1.1. Основные характеристики грузоподъемных машин |
5 |
1.2. Полиспасты |
6 |
1.3. Гибкие подъемные и тяговые органы |
10 |
1.4. Блоки, барабаны |
14 |
1.5. Привод механизма подъема груза |
15 |
1.6. Подбор редукторов, муфт и тормозов для механизма подъема |
17 |
1.7. Пример расчета механизма подъема груза |
22 |
1.8 Расчет и проектирование механизма поворота крана |
27 |
1.9. Пример расчета механизма передвижения МК |
37 |
2. Устройство и основы проектирования |
|
ленточных конвейеров |
|
2.1. Устройство и основы проектирования |
|
ленточных конвейеров |
54 |
2.2. Пример расчета ленточного конвейера |
72 |
3. Пневмотранспортные установки |
|
3.1. Устройство и основы проектирования |
|
пневмотранспортных установок |
77 |
3.2. Примеры расчета пневмотранспортных установок |
87 |
Контрольные вопросы |
94 |
Литература |
96 |
Приложение А. Справочные материалы |
97 |
Приложение Б. Примеры оформления чертежей |
115 |
Введение
Развитие и совершенствование отрасли сельского хозяйства в значительной степени зависит от ее материальной базы, внедрения в проекты развития прогрессивных научно-технических достижений.
Многообразие грузов, различающихся по характеру и назначению, обуславливают применение разнообразных подъемно-транспортирующих механизмов, - грузоподъемников, лебёдок, кран-балок, ленточных конвейеров и т.д. Грузоподъемные машины все чаще включают в систему машин для комплексной механизации грузопотоков.
В связи с этим общеинженерная подготовка в сельскохозяйственных вузах заключается в изучении раздела «Подъемно-транспортирующие машины» (ПТМ). В процессе обучения студенты получают знания об особенностях процессов перегрузки грузов, подъемно-транспортирующих средствах основных типов, их характеристиках, областях применения и методах расчетов.
Изучение дисциплины «Детали машин и основы конструирования» завершается выполнением курсовой работы, в которой одним из вопросов является расчет механизмов и узлов ПТМ.
4
1.Проектирование и расчет механизмов подъема
1.1Основные характеристики грузоподъемных машин
К основным характеристикам грузоподъемных машин относятся: грузоподъемность, скорость перемещений и высота подъема груза, режим работы, вылет стрелы, масса машин.
Грузоподъемность машин (по ГОСТ 1575 – 87) – это масса наибольшего груза, поднимаемого специальным приспособлением. Это величина включает в себя и массу используемого грузозахватного приспособления.
Номинальная грузоподъемность подъемно-транспортных машин, т.: 0,025;0,05; 0,1; 0,125; 0,16; 0,2; 0,25; 0,32; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5; 3,2;4,0; 5,0; 6,3; 8,0; 10,0; 12,5; 16,0; 20,0; 25,0; 32,0; 40,0; 50,0; 63,0; 80,0;
100,0 и т. д. |
|
|
|
|
Скорости |
рабочих |
движений |
грузоподъемных |
механизмов |
рекомендуется выбирать из рядов, установленных также по ГОСТ 1575 – 87
линейные скорости, м/с: 0,1; 0,125; 0,16; 0,2; 0,25; 0,32; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,0; 10,0; 12,5.
При выборе скоростей следует учитывать технологические требования, безопасность работы, тип машин, удобство управления, требуемую точность установки груза и др.
Так для перегрузки штучных грузов рекомендуются следующие скорости механизма подъема груза, м/с: подъем – 0,15; опускание – 0,10.
Правилами Гостехнадзора установлены следующие режимы работы кранов: с ручным приводом – Р; с машинным приводом: легкий – Л, средний
– С, тяжелый – Т. весьма тяжелый – ВТ.
Режимы работы с машинным приводом выбирают в зависимости от коэффициента использования механизма по грузоподъемности КГР , коэффициентов годового и суточного использования механизма, коэффициента относительной продолжительности включения двигателя механизма, СПВ, числа включений механизма в час, температуры окружающей среды. За главные показатели, определяющие режим работы
механизма, приняты коэффициенты использования по грузоподъемности |
К |
ГР |
||
|
|
|
|
|
и относительной продолжительности включения ПВ |
|
|
||
КГР |
QСР |
, |
(1.1) |
|
|
||||
|
QНОМ |
|
|
|
где QСР – средняя масса груза, поднимаемого за смену, кг; QНОМ – номинальная грузоподъемность, кг.
ПВ |
t раб |
100% |
, |
|
t |
|
|||
|
|
|||
|
ц |
|
|
|
|
|
|
|
|
где tраб – сумма продолжительности работы за цикл, мин; tц продолжительность цикла.
(1.2)
5
Режим работы электрооборудования отдельных механизмов выбирают по таблице 1.1 в зависимости от значений рассмотренных ранее коэффициентов.
Таблица 1.1 – Режим работы электрооборудования и отдельных механизмов грузоподъемных машин
Режим |
Коэффициент использования |
|
|
ПВ, |
Число |
Температура |
|||||
работы |
По грузо- |
|
По времени |
|
|
% |
включений |
окружающей |
|||
|
подъемности |
В течение |
В течение |
|
в час |
среды, ºС |
|||||
|
К |
|
|
(среднее |
|
||||||
|
ГР |
года |
К |
|
суток |
К |
|
|
|
||
|
|
г |
с |
|
за смену) |
|
|||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Л |
1 |
Нерегулярная редкая работа |
60 |
25 |
|||||||
|
0,75 |
|
|
|
То же |
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
||||
|
0,25 |
|
0,33 |
|
15 |
|
|
||||
|
0,25 |
0,5 |
|
0,67 |
|
15 |
|
|
|||
|
0,1 |
1 |
|
|
1 |
|
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С |
1 |
1 |
|
|
0,67 |
|
15 |
120 |
25 |
||
|
0,75 |
0,5 |
|
0,33 |
|
25 |
|
|
|||
|
0,5 |
0,5 |
|
0,67 |
|
25 |
|
|
|||
|
0,25 |
1 |
|
|
1 |
|
|
40 |
|
|
|
|
0,1 |
1 |
|
|
1 |
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Т |
1 |
1 |
|
|
0,67 |
|
25 |
240 |
25 |
||
|
1 |
1 |
|
|
0,33 |
|
40 |
|
|
||
|
0,75 |
0,75 |
|
0,67 |
|
40 |
|
|
|||
|
0,5 |
1 |
|
|
1 |
|
|
40 |
|
|
|
|
0,25 |
1 |
|
|
1 |
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВТ |
1 |
1 |
|
|
1 |
|
|
60 |
300…600 |
45 |
|
|
0,75 |
1 |
|
|
1 |
|
|
40 |
|
25 |
|
|
0,5 |
1 |
|
|
1 |
|
|
60 |
|
45 |
|
|
0,25 |
1 |
|
|
1 |
|
|
60 |
|
45 |
|
|
0,7 |
1 |
|
|
1 |
|
|
60 |
|
45 |
|
|
|
|
|
|
|
|
|
|
|
|
|
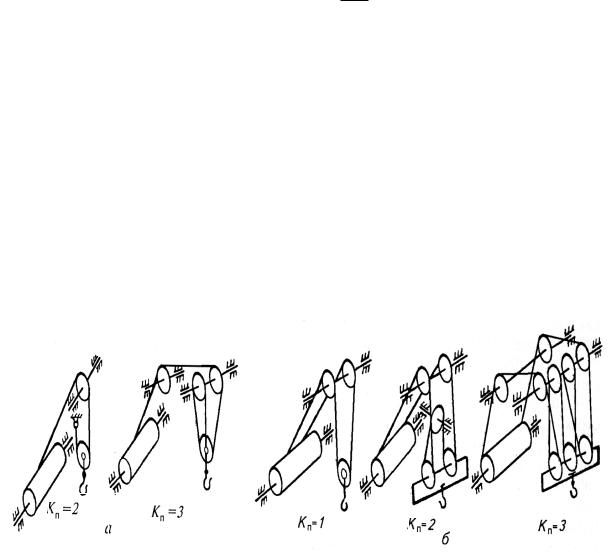
1.2 Полиспасты
Полиспастом называют систему подвижных и неподвижных блоков огибаемых канатом.
Основной характеристикой полиспаста является – кратность полиспастной системы, т.к. она определяется как отношение числа ветвей, участвующих в подъеме груза Z ГР , к числу ветвей, наматывающихся на барабан, ZБ
6
m |
Z |
ГР |
|
|
|||
|
Z |
, |
|
|
Б |
||
|
|
|
|
Кратность полиспастной системы выбирают грузоподъемности механизма (табл. 1.2).
(1.3)
в зависимости от
Таблица 1.2 – Рекомендуемая кратность полиспастов
Сдвоенный полиспаст |
|
|
Простой полиспаст |
|
|||
|
|
|
|
||||
Грузоподъемность, т |
Кратность одного |
Грузоподъемность, т |
Кратность одного |
||||
|
|
полиспаста m |
|
|
полиспаста m |
||
|
|
|
|
|
|
||
до 8 |
2 |
|
до 1 |
1... |
2 |
||
10... |
16 |
2... |
3 |
1,25…6,3 |
2... |
3 |
|
20... |
32 |
3... |
4 |
8... |
16 |
3... |
4 |
|
|
|
|
|
|
|
|
40... |
50 |
4... |
5 |
20... |
32 |
5... |
6 |
|
|
|
|
|
|
|
|
m=2 |
|
m=3 |
|
|
|
|
|
|
|
|
|
|
|
m=1 |
|
|
|
|
|
m=3 |
|||
|
а |
|
|
|
|
б |
|
m=2 |
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
а – одинарные; б – сдвоенные Рисунок 1.1 – Схема полиспастов
Натяжение тяговой ветви каната (Н), наматываемой на барабан S, может быть определено с достаточной точностью по формуле
S |
Qрас |
, |
(1.4) |
|
m |
п |
|||
|
|
|
|
|
где Qрас QГР QКР , сумма веса поднимаемого груза и крюковой обоймы или
грузозахватного устройства. Вес крюковой обоймы выбирают в зависимости от режима работы машины и веса поднимаемого груза (табл. 1.3, 1.4);
m – кратность полиспастной системы определяют по схеме (рис.1.1) или по таблице 1.2;
7

|
п – КПД полиспастной системы, |
||||
|
|||||
по формуле |
|
|
|
|
|
|
|
|
|
1 |
|
|
п |
m |
|||
|
|
|
|
||
|
|
|
|
|
|
определяется в первом приближении
1 |
m |
|
|
|
|
|
|
б |
, |
(1.5) |
|
1 |
|
||
б |
|
|
|
|
|
|
|
|
б |
|
– КПД блока, берется по таблице 1.5.
Таблица 1.3 – Грузоподъемность однорогих крюков (по ГОСТ 6627 – 74*)
Номер крюка |
Ручной привод |
Машинный привод |
|
|
|
|
|
|
|
Режим Л; С |
Режим Т; ВТ |
|
|
|
|
1 |
0,4 |
0,32 |
0,25 |
|
|
|
|
2 |
0,5 |
0,4 |
0,32 |
|
|
|
|
3 |
0,64 |
0,5 |
0,4 |
|
|
|
|
4 |
0,8 |
0,63 |
0,5 |
|
|
|
|
5 |
1,0 |
0,8 |
0,63 |
|
|
|
|
6 |
1,25 |
1,0 |
0,8 |
|
|
|
|
7 |
1,6 |
1,25 |
1,0 |
|
|
|
|
8 |
2 |
1,6 |
1,25 |
|
|
|
|
9 |
2,5 |
2 |
1,6 |
|
|
|
|
10 |
3,2 |
2,5 |
2,0 |
|
|
|
|
11 |
4 |
3,2 |
2,5 |
|
|
|
|
12 |
5 |
4,0 |
3,2 |
|
|
|
|
13 |
6,3 |
5,0 |
4,0 |
|
|
|
|
14 |
8 |
6,3 |
5,0 |
|
|
|
|
15 |
10 |
8,0 |
6,3 |
|
|
|
|
16 |
12,5 |
10 |
8,0 |
|
|
|
|
17 |
16 |
12,5 |
10 |
|
|
|
|
18 |
20 |
16 |
12,5 |
|
|
|
|
19 |
- |
20 |
16 |
|
|
|
|
20 |
- |
25 |
20 |
|
|
|
|
8
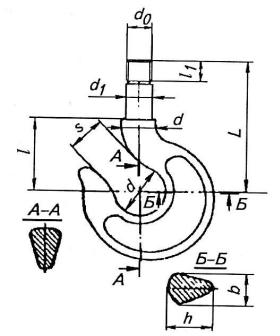
Рисунок 1.2 – Эскиз крюка
Таблица 1.4 – Основные размеры крюков, мм
Номер |
A |
s |
b |
h |
d |
d1 |
d0 |
L |
|
|
1 |
Масса, кг |
||
крюка |
|
|
||||||||||||
|
|
|
|
|
|
|
ТипА |
|
ТипБ |
не менее |
ТипА |
ТипБ |
||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
20 |
14 |
12 |
18 |
15 |
12 |
М12 |
65 |
|
80 |
30 |
20 |
0,18 |
0,2 |
2 |
22 |
16 |
13 |
21 |
15 |
12 |
М12 |
70 |
|
90 |
32 |
20 |
0,22 |
0,25 |
3 |
25 |
18 |
15 |
24 |
18 |
15 |
М14 |
75 |
|
100 |
35 |
20 |
0,35 |
0,4 |
4 |
30 |
22 |
18 |
26 |
20 |
17 |
М16 |
85 |
|
110 |
40 |
25 |
0,5 |
0,6 |
5 |
32 |
24 |
20 |
28 |
20 |
17 |
М16 |
90 |
|
120 |
45 |
25 |
0,6 |
0,7 |
6 |
36 |
26 |
22 |
32 |
25 |
20 |
М20 |
105 |
|
130 |
50 |
30 |
0,9 |
1 |
7 |
40 |
30 |
24 |
36 |
25 |
20 |
М20 |
110 |
|
140 |
35 |
30 |
1,1 |
1,2 |
8 |
45 |
33 |
26 |
40 |
30 |
25 |
М24 |
130 |
|
160 |
65 |
35 |
1,7 |
1,9 |
9 |
50 |
36 |
30 |
45 |
35 |
30 |
М27 |
145 |
|
180 |
70 |
40 |
2,6 |
2,9 |
10 |
55 |
40 |
34 |
52 |
35 |
30 |
М30 |
165 |
|
220 |
85 |
45 |
3,2 |
3,6 |
11 |
60 |
45 |
38 |
55 |
40 |
35 |
М33 |
180 |
|
300 |
90 |
50 |
4,5 |
5,7 |
12 |
65 |
50 |
40 |
65 |
45 |
40 |
М36 |
195 |
|
375 |
95 |
55 |
5,9 |
8,1 |
13 |
75 |
55 |
48 |
75 |
52 |
45 |
М42 |
250 |
|
410 |
105 |
60 |
9,6 |
12,2 |
14 |
85 |
65 |
54 |
82 |
56 |
50 |
М48 |
280 |
|
475 |
120 |
70 |
12,5 |
16,2 |
15 |
95 |
75 |
60 |
90 |
62 |
55 |
М52 |
310 |
|
520 |
135 |
75 |
18 |
23 |
16 |
110 |
85 |
65 |
100 |
63 |
60 |
М56 |
340 |
|
580 |
150 |
80 |
26 |
33 |
17 |
120 |
90 |
75 |
115 |
80 |
70 |
М64 |
415 |
|
600 |
165 |
90 |
36 |
43 |
18 |
130 |
100 |
80 |
130 |
85 |
75 |
Трап |
440 |
|
630 |
180 |
95 |
47 |
56 |
|
|
|
|
|
|
|
70х80 |
|
|
|
|
|
|
|
19 |
150 |
115 |
90 |
150 |
95 |
85 |
Трап |
480 |
|
660 |
210 |
100 |
64 |
74 |
|
|
|
|
|
|
|
80х10 |
|
|
|
|
|
|
|
20 |
170 |
130 |
102 |
164 |
110 |
100 |
Трап |
535 |
|
730 |
230 |
115 |
95 |
110 |
|
|
|
|
|
|
|
90х12 |
|
|
|
|
|
|
|
9
Примечание: Тип А – короткий крюк, Тип Б – удлиненный
Таблица 1.5 – Коэффициенты полезного действия
|
б |
|
крюковых полиспастов
Тип подшипников блоков |
|
б |
при кратности in |
|
|||
|
|
|
|
|
|
|
|
|
|
2 |
3 |
3 |
4 |
5 |
6 |
|
|
|
|
|
|
|
|
Скольжения |
|
|
|
|
|
|
|
КПД блока бл |
= 0,96 |
0,98 |
0,96 |
|
0,94 |
0,92 |
0,90 |
|
|
|
|
|
|
|
|
Качения |
|
|
|
|
|
|
|
КПД блока бл |
= 0,98 |
0,99 |
0,98 |
|
0,97 |
0,96 |
0,95 |
|
|
|
|
|
|
|
|
1.3.Гибкие подъемные и тяговые органы
В качестве гибких тяговых органов используются стальные канаты, и пластинчатые цепи. Их выбор зависит от назначения, условий эксплуатации, режима работы и особых требований.
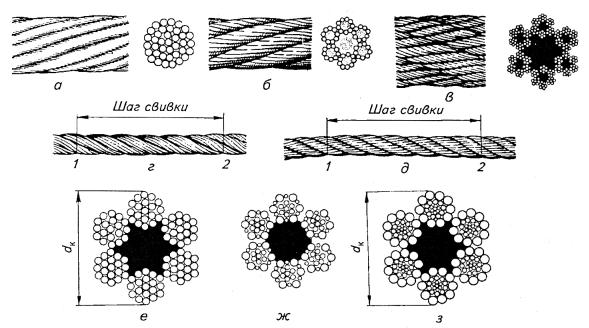
Канаты. Промышленность выпускает стальные проволочные канаты разных типов, различающихся конструкцией, характером и направлением свивки и размером проволок. Конструкции стальных канатов представлены на рис. 1.3.
а – одинарной свивки, б – двойной свивки из отдельных прядей, в – тройной свивки из канатов двойной свивки, г – односторонней свивки, д – крестовой свивки, е – типа ЛК-О, ж – типа ЛК-Р, з – ЛК-РО
Рисунок 1.3 – Стальные канаты
10