

П.Т.М. [учебное пособие]
.pdfТаблица 1.28 – Основные размеры колодочных тормозов типа ТКТ, мм
(рис.1.19)
Типоразмер |
D |
B |
В |
с |
с |
2 |
L |
L |
L |
L |
H |
s |
d |
δ |
h |
тормоза |
|
|
1 |
1 |
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТКТ-100 |
100 |
130 |
70 |
110 |
40 |
421 |
150 |
250 |
120 |
292 |
6 |
13 |
4 |
100 |
|
ТКТ-200/100 |
200 |
130 |
90 |
175 |
60 |
566 |
265 |
430 |
180 |
432 |
8 |
17 |
6 |
170 |
|
ТКТ-200 |
200 |
177 |
90 |
175 |
60 |
681 |
265 |
430 |
212 |
480 |
8 |
17 |
6 |
170 |
|
ТКТ-300/200 |
300 |
177 |
140 |
250 |
80 |
808 |
390 |
540 |
270 |
620 |
12 |
21 |
8 |
240 |
|
1, 5 – вертикальные рычаги; 2 – скоба; 3 – короткоходовой электромагнит; 4 – якорь; 6 – болт; 7 – пружина; 8 – шток; 9 – вспомогательная пружина; 10 – основание; 11 – колодки
Рисунок 1.19 – Колодочных тормозов типа ТКТ с электромагнитом
51

Таблица 1.29 – Варианты задач по курсовой работе на тему ”Расчёт механизма передвижения мостового однобалочного крана”
Исходные |
|
|
|
|
|
|
|
|
|
|
|
|
Варианты |
|
|
|
|
|
|
|
|
|
|
|||||||
данные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
3 |
|
4 |
|
|
5 |
|
|
|
|
6 |
|
|
7 |
|
8 |
9 |
10 |
|
|
11 |
12 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Грузо- |
1,0 |
1,2 |
|
1,3 |
|
1,4 |
|
|
1,5 |
|
|
1,6 |
|
|
1,7 |
|
1,8 |
1,9 |
2,0 |
|
|
2,0 |
1,2 |
|||||||
подъемность, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q, т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пролет крана, |
10,0 |
10,1 |
|
10,2 |
|
10,3 |
|
10,4 |
|
10,5 |
|
10,6 |
|
10,7 |
10,8 |
10,9 |
|
|
11,0 |
11,2 |
||||||||||
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость |
0,41 |
0,42 |
|
0,43 |
|
0,44 |
|
0,45 |
|
0,46 |
|
0,47 |
|
0,48 |
0,49 |
0,50 |
|
|
0,51 |
0,52 |
||||||||||
передвижения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
крана, v, м/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Высота |
6,0 |
6,0 |
|
6,0 |
|
6,0 |
|
|
6,0 |
|
|
12,0 |
|
12,0 |
|
12,0 |
12,0 |
12,0 |
|
|
18,0 |
18,0 |
||||||||
подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
груза, Н, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим работы |
|
|
|
|
|
|
|
|
Средний режим работы |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Управление движением мостового крана: для всех вариантов с пола |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Исходные |
|
|
|
|
|
|
|
|
|
|
|
|
Варианты |
|
|
|
|
|
|
|
|
|
|
|||||||
данные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
14 |
|
15 |
|
16 |
|
17 |
|
|
18 |
|
19 |
|
|
20 |
|
21 |
|
22 |
|
23 |
|
|
24 |
|
25 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Грузо- |
1,3 |
1,1 |
|
1,4 |
|
1,5 |
|
1,5 |
|
1,6 |
|
1,6 |
|
|
1,7 |
|
1,7 |
|
1,8 |
|
1,9 |
|
|
1,9 |
|
2,0 |
||||
подъемность, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q, т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пролет крана, |
11,4 |
11,3 |
|
11,5 |
|
11,6 |
|
11,7 |
|
11,8 |
|
11,9 |
|
12,0 |
10,9 |
|
10,8 |
|
10,7 |
|
|
10,6 |
|
10,5 |
||||||
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость |
0,53 |
0,54 |
|
0,55 |
|
0,56 |
|
0,57 |
|
0,58 |
|
0,59 |
|
0,60 |
0,51 |
|
0,52 |
|
0,53 |
|
|
0,54 |
|
0,55 |
||||||
передвижения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
крана, v, м/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Высота |
18,0 |
18,0 |
|
18,0 |
|
6,0 |
|
6,0 |
|
6,0 |
|
6,0 |
|
|
6,0 |
|
12,0 |
|
12,0 |
|
12,0 |
|
|
12,0 |
|
12,0 |
||||
подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
груза, Н, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим работы |
|
|
|
|
|
|
|
|
Средний режим работы |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Управление движением мостового крана: для всех вариантов с пола
52
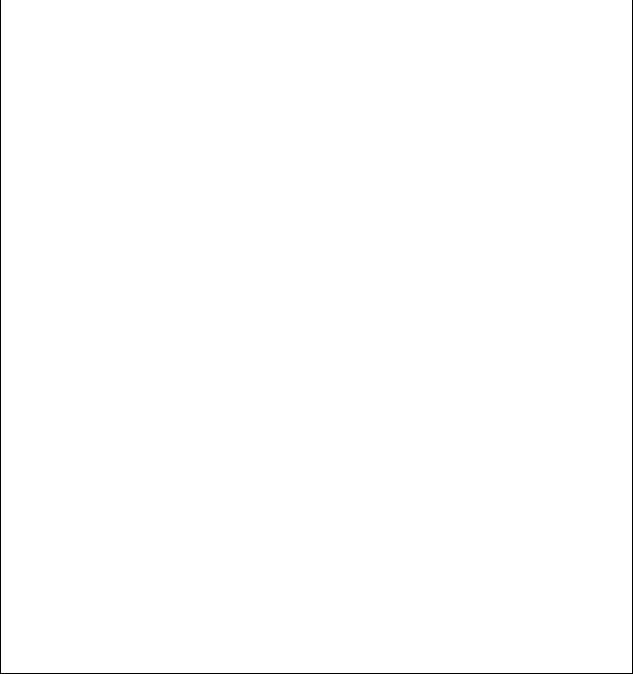
Таблица 1.30 – Варианты задач по курсовой работе на тему ”Расчёт механизма подъема груза”
Исход- |
|
|
|
|
|
Варианты |
|
|
|
|
|
|||
ные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
||
данные |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Грузо- |
70 |
75 |
80 |
125 |
120 |
115 |
110 |
105 |
100 |
85 |
90 |
95 |
71 |
|
подъем- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ность, кН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость |
0,24 |
0,23 |
0,22 |
0,21 |
0,20 |
0,18 |
0,19 |
0,20 |
0,21 |
0,22 |
0,23 |
0,24 |
0,21 |
|
подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
груза, м/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Высота |
18 |
12 |
6 |
6 |
12 |
18 |
6 |
18 |
12 |
18 |
12 |
6 |
6 |
|
подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
груза, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим |
|
|
|
|
Средний режим работы |
|
|
|
|
|||||
работы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Время разгона двигателя до набора номинальных оборотов для среднего режима работы
2…2,5 с
Исход- |
|
|
|
|
|
|
Варианты |
|
|
|
|
|
||
ные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
15 |
16 |
17 |
18 |
19 |
|
20 |
21 |
22 |
23 |
24 |
25 |
26 |
|
данные |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Грузо- |
72 |
81 |
82 |
83 |
84 |
91 |
|
92 |
93 |
94 |
101 |
102 |
103 |
104 |
подъем- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ность, кН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость |
0,17 |
0,18 |
0,19 |
0,20 |
0,22 |
0,23 |
|
0,24 |
0,21 |
0,19 |
0,18 |
0,17 |
0,23 |
0,25 |
подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
груза, м/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Высота |
12 |
12 |
12 |
18 |
18 |
18 |
|
6 |
6 |
6 |
12 |
18 |
6 |
12 |
подъема |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
груза, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим |
|
|
|
|
Средний режим работы |
|
|
|
|
|||||
работы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Время разгона двигателя до набора номинальных оборотов для среднего режима работы
2…2,5 с
53
2.Устройство и основы проектирования ленточных конвейеров
2.1Устройство и основы проектирования ленточных конвейеров
Среди транспортирующих машин вообще и с тяговым органом в
частности наиболее распространены ленточные конвейеры. Это обусловлено их преимуществами: высокой производительностью, простотой конструкции, небольшим расходом энергии, надежностью транспортирования груза на большие расстояния с большой скоростью, использованием для перемещения как штучных, так и сыпучих грузов и др.
Принцип действия ленточных конвейеров основан на сцеплении ленты с приводом (ведущим) барабаном, что обеспечивает ей движение, а тем самым и перемещение груза, находящегося на рабочей ветви ленты.
Работа ленточного конвейера с гладкой лентой возможна при условии, что угол трения по ленте ψ (tg ψ = fг) не меньше угла наклона рабочей ветви к горизонтали р, т. е. ψ ≥ β. Для увеличения угла наклона транспортирования применяют специальные ленты - рифленые, с перегородками и накладками.
Ленточные конвейеры (транспортеры) бывают стационарные (рис. 2.1) и передвижные (рис. 2.2). Они представляют собой бесконечную ленту 7 (см. рис. 2.1), охватывающую барабаны ведущий 15, приводимый в действие от приводного механизма 14, и ведомый (натяжной) 3 на тележке 1 с грузом 2 для натяжения ленты. Верхнюю рабочую (ведущую) ветвь поддерживает опорные ролики б, а нижнюю ведомую (холостую) - ролики 5.
Лента представляет собой основную часть ленточного конвейера, являясь как тяговым, так и несущим органом. Лента должна обладать высокими прочностью, эластичностью и износостойкостью, хорошей сопротивляемостью, расслаиванию при многократных перегибах, малой гигроскопичностью, стойкостью к физико-химическому воздействию грузов и окружающей среды.
Конструкции некоторых транспортных лент представлены на рисунке 2.3. В торговых предприятиях наиболее распространены резинотканевые ленты (по ГОСТ 20-85*, см. табл. А.1 приложения), состоящие из нескольких провулканизированных прокладок. Для транспортирования крупнокусковых и других специфических грузов применяют резинотросовые ленты, стальные тросы которых завулканизированы в резину.
С целью защиты от механических повреждений и влаги ленту покрывают слоем резины. Толщина слоя резины с рабочей стороны ленты
1 = 1,5...6 мм, с опорной - |
2 = 1…2 мм. Общая толщина резинотканевой |
|
ленты |
|
|
|
0 z 1 2 , |
(2.1) |
где 0 – толщина одной прокладки,
z – число прокладок. Линейная плотность ленты (т. е. масса 1 м длины), кг/м,
54
Линейная плотность ленты (т.е. масса 1 м длины), кг/м,
q |
Л |
1,12 B |
, |
|
|
где 1,12 – среднее значение массы 1 м2 ленты толщиной 1 мм;
В – ширина ленты, м.
При транспортировании сыпучих грузов ширина движущихся по плоской опоре
B |
Q |
, |
|
||
0,576 C tg v |
|
||||
|
|
|
|||
|
|
|
|
||
по желобчатой опоре |
|
|
|
|
|
B |
|
Q |
|
, |
|
(0,576 C tg 0,157) v |
|||||
|
|||||
|
|
||||
(2.2)
ленты,
(2.3)
(2.4)
1 – тележка; 2 – груз для натяжения ленты; 3 – ведомый (натяжной) барабан; 4 – загрузочное устройство; 5 и 6 – ролики; 7 – лента; 8 – отклоняющий барабан; 9 и 10 – разгрузочные устройства; 11 – разгрузочный желоб;
12 – устройство для очистки лепты; 13 – рама; 14 – приводной механизм; 15 – ведущий барабан.
Рисунок 2.1 – Схема стационарного наклонно-горизонтального ленточного конвейера
55
где Q – производительность, т/ч;
С – коэффициент, учитывающий уменьшение площади сечения груза в результате осыпания;
0,35 0 – угол естественного откоса груза на движущейся лепте;
0 – угол естественного откоса груза в состоянии покоя, зависящий от его
физико-механических свойств (табл. A.2 приложения);
ρ – плотность груза, кг/ м |
3 |
); |
|
v – скорость ленты, зависящая от вида транспортируемого груза, м/с (табл. 2.1)
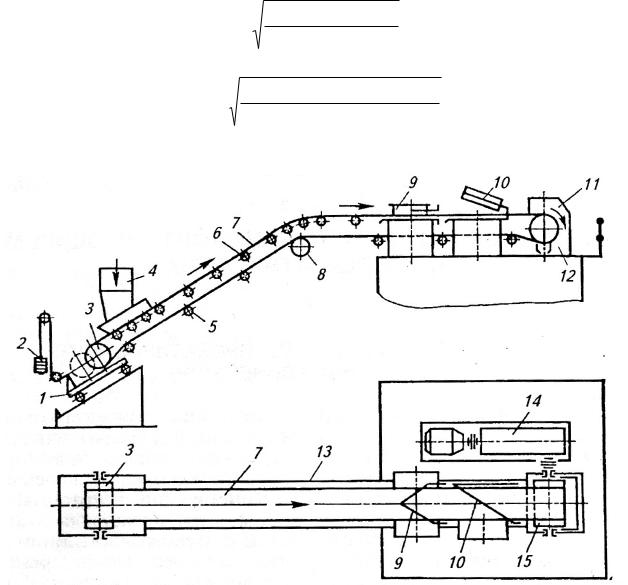
1 – лента; 2 – загрузочное устройство; 3 – механизм регулировки высоты подъема; 4 – опорное колесо
Рисунок 2.2 – Схема передвижного ленточного конвейера
а – резинотканевая; б – резинотросовая; в, г – с ребристой рабочей поверхностью;
д– плоская с бортами; е – с перегородками; ж – с продольным замком;
з– полотняно-планчатая; 1 и 2 – рабочая и опорная стороны; 3 – прокладки;
4 – защитная ткань; 5 – тросики Рисунок 2.3 – Конструкции транспортных лент
56
Таблица 2.1 – Значения скорости ленты при транспортировании различных грузов
Груз |
Скорость |
Груз |
Скорость |
|
ленты, м/с |
|
ленты, м/с |
Пшеница, |
2…4,5 |
Корнеплоды |
0,75...1,5 |
рожь, кукуруза |
|
Штучные грузы |
0,5...1,5 |
Овес, ячмень, |
2...3 |
Мука, цемент |
0,8...1,25 |
подсолнечник |
|
Удобрения, |
1,5...3 |
Дробленое |
1...2 |
песок, гравий |
|
зерно, отруби |
|
Солома |
0,8...1,4 |
Кукуруза в |
1,5…2,5 |
|
|
початках |
|
|
|
|
|
|
|
Коэффициент С, учитывающий угол наклона конвейера, принимается в зависимости от угла наклона β рабочей ветви конвейера из следующих значений:
β, град |
|
|
0…10 |
|
10…15 |
|
|
15…20 |
|
20…25 |
||||
С |
|
|
|
1 |
|
0,95 |
|
|
|
0,9 |
|
0,85 |
||
|
|
|
|
|
|
|||||||||
|
Ширину ленты с некоторыми допущениями определяется по |
|||||||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
B |
|
Q |
|
|
|
|
|
||
|
|
|
|
|
|
|
c |
|
|
, |
|
(2.5) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
K |
|
K |
|
v |
|
|||
|
|
|
|
|
|
П |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Qc – секундная производительность, кг/с; |
|
|
|
|||||||||||
K |
П |
|
коэффициент производительности, |
зависящий |
от формы |
|||||||||
|
|
|||||||||||||
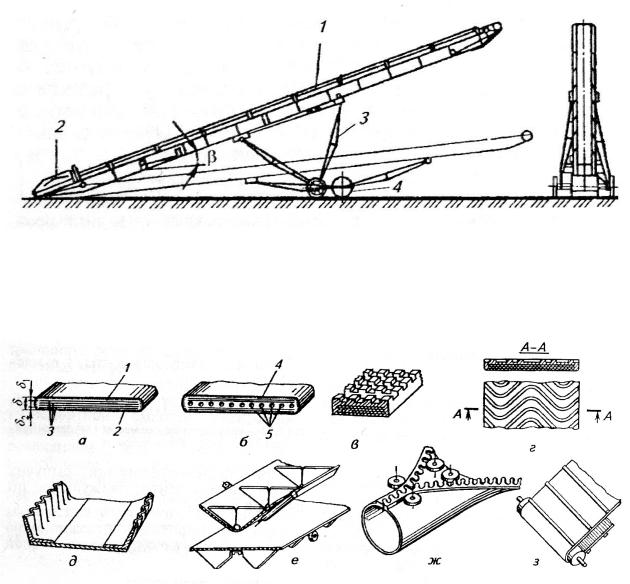
поперечного сечения потока и физико-механических свойств транспортируемого груза;
Кв = 1…0,75 — коэффициент, учитывающий осыпание груза при угле наклона конвейера от 0 до 20°.
Далее приведены значения коэффициента производительности |
K |
П |
в |
|
|||
зависимости от формы сечения потока груза. |
|
|
|
При транспортировке штучных грузов
B b 0,1 |
, |
(2.6) |
|
где b – наибольший габаритный размер груза, м.
Полученную расчетом ширину ленты следует округлить до ближайшего большего стандартного значения: 300; 400; 500; 650; 1000; 1200;
1400; 1600; 1800; 2000; 2250; 2750; 3000.
57
С целью уменьшения напряжения изгиба в ленте число прокладок должно быть минимальное, но не в ущерб ее прочности, которая должна удовлетворять условию
S |
z B KР |
[S], |
(2.7) |
|
Fmax
где S и [S] – соответственно расчетный и допустимый коэффициенты запаса прочности лент: резинотканевых – 8...9, синтетических – 9... 10, комбинированных – 9... 11,5;
K |
Р |
– прочность ткани одной прокладки на разрыв по ширине основы, |
|
|
Н/мм (табл. А.1 приложения);
Fmax – наибольшее натяжение в ленте, Н.
Барабаны, применяемые в ленточных конвейерах, бывают приводные, натяжные, поворотные и отклоняющие. Последние служат для изменения направления ленты и увеличения угла обхвата. Барабаны чаще всего отливают из чугуна, сваривают из листовой стали или труб и реже выполняют деревянными (рис. 2.4).
С целью улучшения сцепления с лентой приводные барабаны могут быть покрыты резинотканевой лентой или деревянными планками.
Для обеспечения нормальных условий работы резинотканевой ленты и предотвращения ее расслоения диаметр барабана должен удовлетворять условию
D
K |
K |
2 |
1 |
|
z
,
(2.8)
где |
K |
1 |
– коэффициент, зависящий от прочности прокладок; |
|
K |
2 |
– коэффициент, зависящий от типа барабана: |
|
|
|
для приводного – 1... 1,1; для натяжного – 0,8...0,9; для отклоняющего – 0,5;
z – число прокладок. |
|
|
|
|||
Коэффициент |
K |
1 |
выбирают из следующих значений: |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KР , Н/мм |
|
|
65 |
100 |
150 |
|
|
|
|
|
|
|
|
K1 |
|
|
125…140 |
141…160 |
161…170 |
|
KР , Н/мм |
|
|
200 |
300 |
400 |
|
K1 |
|
|
171...180 |
181…190 |
191…200 |
|
Меньшие значения K1 |
принимают для лент малой ширины. Диаметр |
|||||
барабана округляют по ГОСТ 22644—77* до значения, соответствующего ряду чисел: 160; 200; 250;315; 400; 500; 630; 800; 1000 и более. Чтобы предотвратить сбегание ленты, барабаны рекомендуется выполнять бочкообразной формы с целью их самоцентрирования. Выпуклость принимают равной 0,005 ширины ленты, но не менее 4 мм, а длину барабана /б — на 100... 120 мм больше ширины ленты.
Опоры ленты служат для поддержания ленты и уменьшения ее провисания. В качестве опор применяют ролики (рис.2.5, а, б) или настил
58
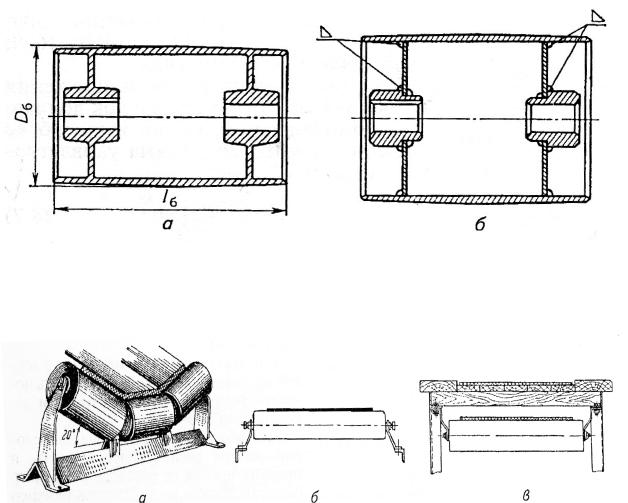
(рис. 2.5, в). Последний изготовляют из дерева или листовой стали. Использование настила упрощает и удешевляет конструкцию конвейера. Однако при этом увеличиваются сопротивление движению ленты и потребная мощность, резко возрастает износ ленты и сокращается срок ее службы.
При транспортировании сыпучих и кусковых грузов опоры рабочей ветви выполняют желобчатой формы (см. рис. 2.5, а). Тем самым придают аналогичную форму самой рабочей ветви ленты, что увеличивает площадь поперечного сечения груза на ленте и повышает производительность конвейера.
Конструкция роликов может быть различной и определяется в основном типом подшипников, конструктивным исполнением их опор. Сам ролик 1 (рис. 2.6, а) состоит из корпуса, обычно представляющего собой отрезок стальной трубы, и двух торцевых дисков. В диски запрессованы или вварены оси 4, на которые насажены подшипники 3. Корпуса подшипников крепят к раме 2.
а – барабан литой из чугуна; б – барабан сварной Рисунок 2.4 – Барабаны для лент
а, б – ролики; в – настил Рисунок 2.5 – Опоры лент
59
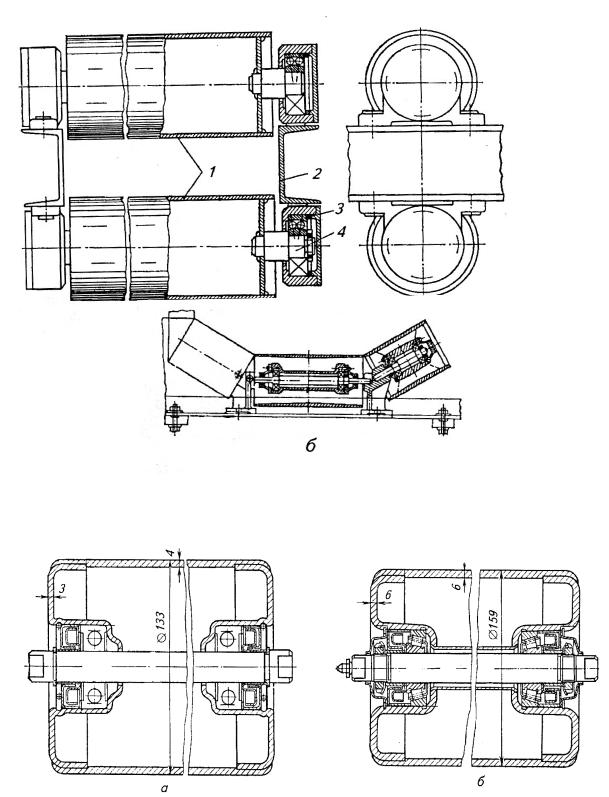
а – прямая: 1 – ролик, 2 – рама, 3 – подшипник, 4 – ось; б – желобчатая Рисунок 2.6 – Роликовые опоры
а – легкого типа; б – тяжелого типа Рисунок 2.7 – Ролики с неподвижными осями
60