

17. Pcnc – 4.
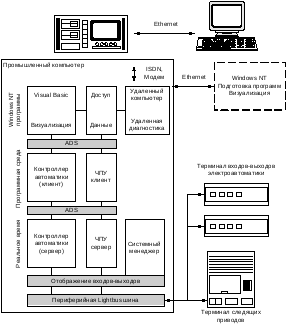
ЧПУ фирмы Beckhoff (Германия) Отличительная особенность заключается в том, что все задачи управления (геометрическая, логическая, терминальная) решены программным путем, без какой-либо дополнительной аппаратной поддержки (рис. 3). Внешний интерфейс на базе шины LightBus фирмы Beckhoff. Эта шина представляет собой кольцевой канал для передачи сигналов управления автономными следящими приводами, а также и для передачи сигналов электроавтоматики.
Операционная система TwinCat фирмы Beckhoff интегрированная в Windows NT, добавляет ей функции реального времени, не изменяя свойства самой Windows NT. Система TwinCat служит центром системной конфигурации, поддерживающим синхронное или асинхронное взаимодействие всех процессов, а также и ввод-вывод сигналов управления.
клиентскую часть (для подготовки данных) и серверную часть (для работы в реальном времени).
ЧПУ-клиент интерпретирует кадры управляющей программы в стандарте DIN 66025, а ЧПУ-сервер выполняет интерполяцию в "группах приводов"(по три координаты в группе).
Группы в свою очередь формируются с помощью системы TwinCat. Одновременно работают до четырех контроллеров (являющихся виртуальными процессорами, работающими в стандарте IEC 1131-3), каждый из которых решает четыре задачи, имеющие свой приоритет и время цикла.
18. Линеаризация графическим способом (2-й метод)
Второй метод.
В некоторых случаях нелинейные характеристики систем и объектов задаются в графическом виде. Например:
 .
.
Линеаризацию
таких характеристик проводят графическим
образом. В рабочей точке
 с координатами
с координатами кривая заменяется касательной. Вместо
частных производных определяются
частные разности
кривая заменяется касательной. Вместо
частных производных определяются
частные разности .
Тогда в пределах интервала
.
Тогда в пределах интервала можно записать
равенство:
можно записать
равенство:
 .
.
Обозначая
 ,
запишем
линеаризованное уравнение:
,
запишем
линеаризованное уравнение:
 .
.
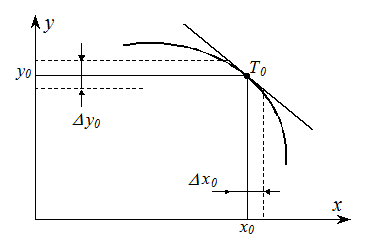
Рисунок 3.2 – Графическая линеаризация нелинейной кривой
20. Линеаризация нелинейной модели АД по его электромеханической характеристике.
Динамика вращения ротора трехфазного двигателя определяется нелинейным уравнением:
 .
(3.5)
.
(3.5)
Момент
 зависит от напряжения питания статора
зависит от напряжения питания статора ,
угловой скорости
,
угловой скорости ,
и характеризуется зависимостью
,
и характеризуется зависимостью (кривые 1-3). Момент сопротивления
(кривые 1-3). Момент сопротивления зависит от скорости
зависит от скорости и определяется зависимостью
и определяется зависимостью (кривые 4,5).
(кривые 4,5).

Учитывая
значительную нелинейность характеристик
 и
и ,
линеаризуем их в относительно небольшом
диапазоне изменения угловой скорости
,
линеаризуем их в относительно небольшом
диапазоне изменения угловой скорости .
В точке “А” на кривой 2 имеем установившиеся
значения
.
В точке “А” на кривой 2 имеем установившиеся
значения при
при и
и .
.
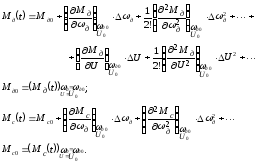
Функциональные
зависимости
 и
и в окрестности точки “А” можно представить
в виде ряда Тейлора:
в окрестности точки “А” можно представить
в виде ряда Тейлора:
Подставим
два первых члена ряда (рассматривается
только линейная часть характеристики)
в исходное уравнение (3.5), записанное в
отклонениях с учетом
 :
:
 .
.
21.Дпт нв в уравнениях в форме Коши.
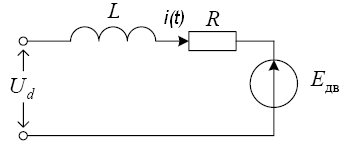
RЯ, LЯ – активное сопротивление и индуктивность якоря.
kE,kM – электромагнитная и механическая конструктивные постоянные двигателя.
Ј – динамический момент инерции.
МС – момент механического сопротивления.
b – коэффициент пропорциональности, характеризующий зависимость момента сопротивления от скорости
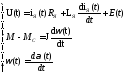
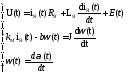
На основании физики процессов и схемы замещения можно записать систему диф.уравнений в следующем виде
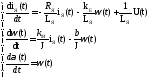
Данные диф. Уравнения записаны в форме Коши.