

12. Архитектура строения систем чпу cnc, pcnc-1
К этим типам относится семейство NUM (концерн Schneider, Германия) (рис. 1.1), построенное по принципу многопроцессорных CNC-систем: с ЧПУ-процессором, процессором программируемого контроллера автоматики и графическим процессором. Система NUM оснащается пассивным терминалом или промышленным компьютером с операционной системой Windows-98.
Кроме этого, в зависимости от требований устанавливается различное число входов-выходов электроавтоматики. Вычислительная мощность систем NUM достаточно высока, и этим объясняется широкий набор их функциональных возможностей
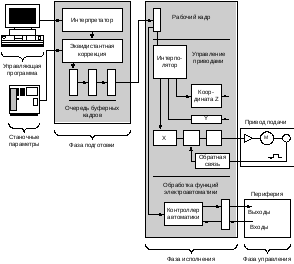
Рис. 1.1. Архитектура системы ЧПУ типа CNC фирмы NUM
PCNC (рис. 1.2) выполнена по классической схеме: специализированный промышленный компьютер с операционной системой Windows NT и возможностью разрабатывать пользова- тельские приложения на Visual Basic, PCI-одноплатный ЧПУ-компьютер, выполняющий все функции ядра, включая программно-реализованный контроллер электроавтоматики. С помощью общего для всей системы терминала осуществляется программирование и редактирование контроллера.
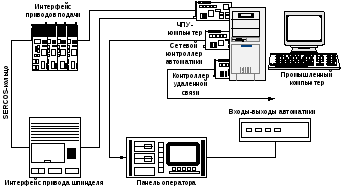
Рис. 1.2. Архитектура системы ЧПУ класса PCNC-1 фирмы Allen-Bradley
13. Линеаризация методом Тейлора
Пусть объект управления описывается уравнениями
 ,
(3.1)
,
(3.1)
с контролируемыми или измеряемыми выходами
 ,
(3.2)
,
(3.2)
где
 –
– -мерные,
-мерные, –
– -мерный,
-мерный, –
– -мерные
векторы.
-мерные
векторы.

Здесь
предполагается, что нелинейные функции
 и
и
 ,
которые являются аналитическими в
рабочей области, можно разложить в ряд
Тейлора.
,
которые являются аналитическими в
рабочей области, можно разложить в ряд
Тейлора.
Линеаризуем
уравнение (3.1) при условии малости
приращений
 относительно положения равновесия
относительно положения равновесия и
и ,
где
,
где
 –
вектор состояния положения равновесия
при фиксированном управлении
–
вектор состояния положения равновесия
при фиксированном управлении
 и малых
и малых на интервале
на интервале .
При этом можно записать линейное
уравнение
.
При этом можно записать линейное
уравнение
 ,
,
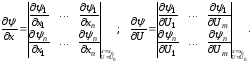
На основе уравнения (3.2) записываем также линейное уравнение в отклонениях:
 ,
(3.3)
,
(3.3)
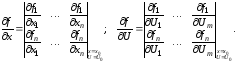
со следующими матрицами частных производных:
Пример (по желанию):
В
качестве примера рассмотрим трехзвенный
механизм в пространстве угловых скоростей
 ,
, ,
, вращения исполнительных электродвигателей
его звеньев.
вращения исполнительных электродвигателей
его звеньев.
 ,
,
 , (1.3.1)
, (1.3.1)
 ,
,
где
 ,
, ,
, – коэффициенты, значение которых
определяется динамическими моментами
инерции двигателя и нагрузки,
конструктивными параметрами
электродвигателя;
– коэффициенты, значение которых
определяется динамическими моментами
инерции двигателя и нагрузки,
конструктивными параметрами
электродвигателя; ,
, ,
, - управляющие воздействия (электромагнитный
момент или ток электродвигателя);
- управляющие воздействия (электромагнитный
момент или ток электродвигателя); ,
, ,
, – коэффициенты, определяющие влияние
угловых скоростей двух звеньев механизма
на третье звено.
– коэффициенты, определяющие влияние
угловых скоростей двух звеньев механизма
на третье звено.
 ,
, .
(1.3.2)
.
(1.3.2)
Обозначим правую часть уравнений (1.3.1) вектор-функцией:
 . (1.3.3)
. (1.3.3)
Таким образом, систему уравнений (1.3.1) можно записать в общей форме:
 . (1.3.4)
. (1.3.4)
Линеаризуем
уравнение (1.3.4) при условии малости
приращений
 ,
, ,
, относительно положения равновесия
относительно положения равновесия ,
где
,
где
 –
вектор состояния положения равновесия
при фиксированном управлении
–
вектор состояния положения равновесия
при фиксированном управлении и малых
и малых на интервале
на интервале .
.
линеаризованное уравнение:
 , (1.3.5)
, (1.3.5)
где частные
производные
 и
и вычисляются в точке
вычисляются в точке равновесного состояния:
равновесного состояния:
 ,
, . (1.3.6)
. (1.3.6)
Для рассматриваемого электромеханического объекта матрицы (1.3.6) принимают значения:
 ,
,
 . (1.3.7)
. (1.3.7)
В результате линеаризованное уравнение (1.3.5) принимает вид:
 . (1.3.8)
. (1.3.8)