7. Организация асу тп дозирования и смешивания сыпучих материалов
Ниже приведена функциональная схема АСУ процессами дозирования и смешивания сыпучих материалов.
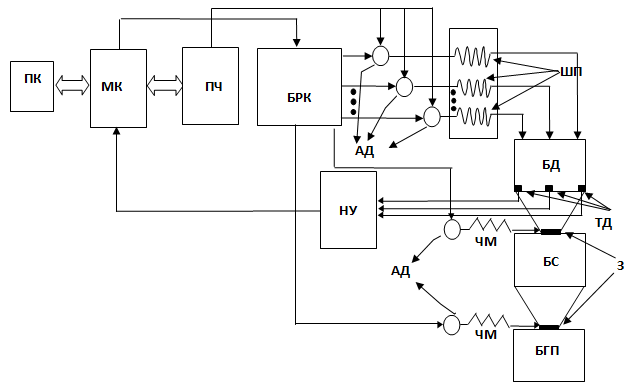
Ниже приведена расшифровка блоков входящие в схему:
1. ПК – персональный компьютер;2. МК – микроконтроллер
3. ПЧ – преобразователь частоты;4. БРК – блок релейной коммутации
5. АД – асинхронный двигатель;6. ШП – шнековый питатель
7. БД – бункер дозатора; 8. ТД - тензодатчик 9. З – задвижка бункера дозатора; 10. ЧМ – червячный механизм 11. НУ – нормирующий усилитель; 12. БС – бункер смеситель
13.
БГП – бункер готовой продукции
8. Определение параметров передаточной функции по кривой переходного процесса
Процесс получения передаточной функции объекта, исходя из данных о переходном процессе, называется идентификацией объекта.

Предположим, что при подаче на вход некоторого объекта ступенчатого воздействия была получена переходная характеристика.
Требуется определить вид и параметры передаточной функции.
Предположим, что передаточная функция имеет вид (апериодического звена 1-го порядка с запаздыванием).
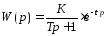 ,
где К - коэффициент усиления, Т - постоянная
времени,
,
где К - коэффициент усиления, Т - постоянная
времени,
τ - запаздывание.
Коэффициентом усиления называется величина, показывающая, во сколько раз данное звено усиливает входной сигнал (в установившемся режиме), и равна отношению выходной величины У в установившемся режиме ко входной величине U:
 ,
Установившееся значение выходной
величины Ууст
,
Установившееся значение выходной
величины Ууст
Запаздыванием τ называется промежуток времени от момента изменения входной величины Uдо начала изменения выходной величины У.
Постоянная времени Т может быть определена несколькими методами в зависимости от вида передаточной функции. Для рассматриваемой передаточной функции 1-го порядка Т определяется наиболее просто: сначала проводится касательная к точке перегиба, затем находятся точки пересечения с осью времени и асимптотой Ууст; время Т определяется как интервал времени между этими точками.
В случае, если на графике между точкой перегиба имеется вогнутость, определяется дополнительное запаздывание τдоп, которое прибавляется к основному:
τ = τ + τдоп.
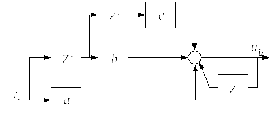
Для технологического объекта или процесса с запаздыванием в управляющем сигнале для структурной схемы следующего вида:

9. Пид – регулирование. Запись закона пид – регулирования в дискретной форме.
На сегодняшний день пропорционально интегрально дифференциальный (ПИД) является одним из наиболее распространенных законов регулирования. Примем следующие обозначения r – задающее воздействие, y – сигнал обратной связи, приходящий на устройство суммирования, e – ошибка регулирования, u – выходной сигнал регулятора. Тогда в общем виде модель такого регулятора имеет вид:
|
|
|


Согласно данной модели структурная схема такого регулятора во временном пространстве имеет вид:

Также часто используют модель данного регулятора в операторном пространстве:


Структурная схема в операторном пространстве имеет следующий вид:

Кроме
того для простоты модель данного
регулятора часто описывается передаточной
функцией
 :
:
Перейдем
к дискретной модели данного регулятора,
основываясь на уравнении
 .
Согласно методу Эйлера:
.
Согласно методу Эйлера:

Здесь T – период дискретизации. Тогда дискретная модель регулятора имеет следующий вид:
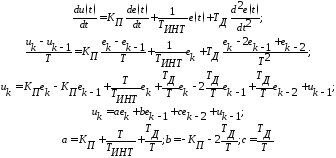
Дискретная структурная схема имеет следующий вид: