

10. Модель системы с запаздыванием в силовом канале.
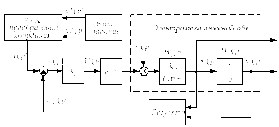
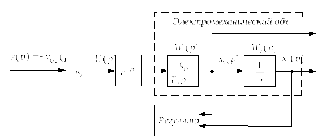
Структура системы управления электромеханическим объектом с запаздыванием в силовом канале.
Представим
электромеханический объект передаточными
функциями: апериодическим звеном первого
порядка и интегрирующим звеном, на
выходах которых формируются переменные
 ,
, состояния, отражающие свойства
электромеханического объекта:
состояния, отражающие свойства
электромеханического объекта:
 ,
,
 ,
,
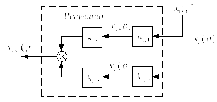
Структура пропорционального регулятора
 ,
,
 .
.
С
учетом обозначений:
 ,
, можно представить в виде:
можно представить в виде:

В
нашем случае матрица
 измерения будет равна диагональной
матрице и имеет вид:
измерения будет равна диагональной
матрице и имеет вид:
 .
.
Таким образом, можно представить в виде:
 .
.
Исходной математической моделью пропорционального П - закона регулирования для данной структуры регулятора является уравнение:

Запишем
 ,
,
 ,
,
Тогда можно записать
 ,
,
 ,
,
 .
.
Математическая
модель сумматора записывается уравнением
ошибку
 регулирования:
регулирования:
Запаздывающую выходную переменную величину записывается следующими равнозначными уравнениями:


В
случае свободного движения
электромеханического объекта или
равенстве нулю задающего
 воздействия (сигнала) и отсутствии
внешних возмущений
воздействия (сигнала) и отсутствии
внешних возмущений структурную схему можно представить
следующим образом.
структурную схему можно представить
следующим образом.
Тогда

Основные показатели качества
Точность управления
Ошибка в статическом режиме
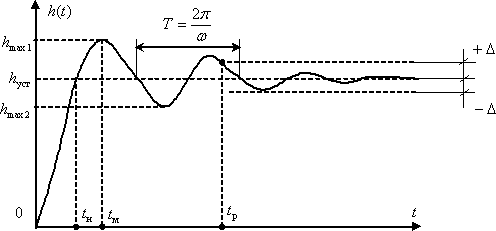
Максимальное перерегулирование
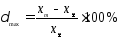 где
где установившиеся значение регулируемой
величины
установившиеся значение регулируемой
величиныВремя переходного процесса
Устойчивость
Дополнительные показатели качества
Скорость нарастания
Колебательность
 -максимальная
скорость отработки регулируемой
величины.
-максимальная
скорость отработки регулируемой
величины.
Квадратичный критерий качества
В общем случае квадратичный критерий оптимальности можно представить в виде:
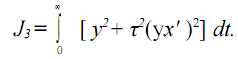
y(t) -отклонение регулируемого параметра от заданного значения;
τ - постоянная, имеющая размерность времени.
По величине интеграла J3 можно приблизительно судить о качестве переходного процесса.
Интеграл J3 можно преобразовать так:

Так
как
 то, обозначая величинуy
при t
= 0 через yо,
получим
то, обозначая величинуy
при t
= 0 через yо,
получим
При
заданной постоянной y
рассматриваемый интеграл имеет минимум,
если первое слагаемое в выражении для
J3
обращается в нуль, т.е. если обращается
в нуль подынтегральная функция.
Следовательно, J3
минимален, если х
удовлетворяет
уравнению:
![]()
Отсюда следует, что наилучшее качество переходного процесса имеет место в случае, если он имеет вид экспоненты, определяемой следующим уравнением:
![]()
Таким образом, идеализированным переходным процессом в этом случае считается не скачкообразная ломаная, а экспонента, к которой и должен стремится реальный переходный процесс. Оценку качества системы но минимуму интеграла J3 следует производить только в тех случаях, когда можно, исходя из требований, с одной стороны, плавности переходного процесса реагирования, а с другой стороны - быстродействия, указать примерное значение показателя τ оптимальной экспоненты. При различных значениях τ идеализированная экспонента будет иметь иной вид или, иными словами, величина J3 для одного и того же действительного процесса будет при выборе различных τ тоже различна, поскольку в этих случаях один и тот же процесс сравнивается с различными эталонами. Определение косвенных показателей качества по интегралу вида J3 дает удовлетворительные результаты и для систем, склонных к повышенной колебательности.