

6.2 Определение возможности возникновения автоколебаний
Так как исследуемая система нелинейная, то для анализа возникновений автоколебаний ее необходимо линеаризовать. Воспользуемся методом гармонической линеаризации: разложить выходной сигнал НЭ в ряд Фурье, а затем оставить только первую гармонику.
НЭ при осуществлении гармонической линеаризации заменяется эквивалентным комплексным коэффициентом передачи:

Автоколебательный режим в гармонически линеаризованной системе может существовать, если она находится на колебательной границе устойчивости. При этом обычно используют необходимые условия нахождения на границе устойчивости. Например, на основе критерия устойчивости Найквиста можно записать
 (33)
(33)
Из этого условия можно найти параметры AП и wП, соответствующие режиму автоколебаний в системе.
Для решения этого уравнения воспользуемся методом построения годографов левой и правой части. Для этого преобразуем (33) к виду:
где правая часть уравнения- обратный комплексный коэффициент передачи.
Так как НЭ представлен
нелинейностью типа «ограничение», то
 примет вид:
примет вид:

где а - ограничение на зону линейности. Согласно ТЗ, a =4 В. Будем считать, что коэффициент наклона нелинейной характеристики УМ равен 1, а коэффициент передачи УМ будем рассматривать отдельно, как часть линейной системы. Отметим, что формула (33) справедлива только при А ≥ а.
Сформулируем условие появления автоколебаний: автоколебания возникнут, если годограф линейной части системы пересечет годограф обратного комплексного коэффициента передачи. Точка пересечения даст значения амплитуды и частоты гармонического сигнала, вызывающего автоколебания.
Построим годографы левой и правой частей уравнения (34):
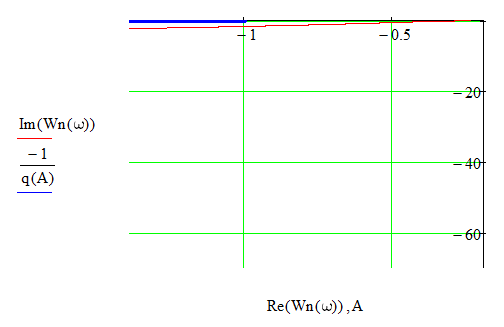
Рисунок 21 - Годографы линейной и нелинейной частей системы(увеличенный масштаб)
Как видно из рисунка, у годографов нет точек пересечения, а значит, равенство (33) не выполняется не при каких значениях частоты и амплитуды. Т.е. при наличии насыщения в УМ, режим автоколебаний невозможен.
Заключение
В результате проделанной работы для заданной в ТЗ системы был синтезирован КУ – регулятор, позволяющий достичь требуемого качества. Синтез регулятора осуществлялся на основе: П-регулятора; ПД-регулятора; метод синтеза желаемой ЛАЧХ. По результатом сравнения полученных КУ был выбран лучший регулятор, имеющий более простую структуру и высокие показатели качества.
Проектируемая система испытывалась при отработке типовых входных воздействий, перечисленных в ТЗ.
При учете нелинейности, была исследована реакция нелинейной системы с насыщением УМ на входной ступенчатый сигнал. Были отмечены отличия нелинейной системы от линейной при воспроизведении этого сигнала. Для эффективного и надежного использования спроектированной САР была указан желаемый диапазон входных сигналов для работы системы в зоне линейного усиления.
Библиографический список
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.:Наука, 1975.
2.Макаров И.М., Менский Б.М. Линейные автоматические системы. —М.: Машиностроение, 1982.