

Построение лчх
Для построения ЛЧХ исходной системы, запишем значения частот сопряжения:
 ;
;

Построение ЛЧХ КУ выполнено на миллиметровой бумаге.
Получение передаточной функции ку по полученной лчх.
Передаточная функция синтезированного корректирующего устройства:
 .
(19)
.
(19)
где Т0=0.37 с; Т1=0.12 с; Т2=0.003 с.
Полученная ПФ имеет 3 порядок. Попробуем упростить систему, снизив ее порядок. Для этого проанализируем желаемую ЛАЧХ. НЧ участок изменять мы не можем, так как резко ухудшатся характеристики установившегося режима. Рассмотрим СЧ участок. Имеется резкий переход с -20 дБ/дек до -60 дБ/дек на частоте ω2. Попробуем сгладить этот участок характеристики, заменив один резкий переход двумя более плавными переходами и уменьшив одну частоту сопряжения до ωб.
Проводя перечисленную коррекцию, получим:
 .
(20)
.
(20)
Полученная система – 2-го порядка. Следовательно, выполненная коррекция снизила порядок КУ, что упростило физическую реализацию этого устройства.
По полученным графикам определим значение коэффициента усиления КУ.

Полученное КУ включим в цепь системы перед усилителем мощности.
Сделав это, определим ПФ по выходу ДОС всей системы:

4.2 Анализ системы на соответствие тз.
Проводить анализ будем аналогично предыдущим пунктам проверки на соответствие ТЗ. Так как мы имеем два варианта КУ(3-го и 2-го порядков соответственно), то подвергнем анализу каждый из возможных вариантов.
Проверка коэффициента ошибки системы:
Так как у обоих вариантов коэффициенты усиления будут одинаковы, то ограничимся проверкой одного из них.
Пользуясь ранее полученной формулой по определению коэффициента ошибки, получим:


Так как 0.0094<0.012, то требование ТЗ по обеспечению качества в установившемся режиме выполняется для каждого варианта.
Проверка прямых показателей качества:
Расчет этого пункта приведен в приложении F.
По определенным значениям прямых показателей качества, можем сказать, что каждая из системы удовлетворяет требованиям ТЗ. По результатам анализа видно, что у скорректированной системы 2-го порядка хуже показатель перерегулирования, чем у нескорректированной системы (Ϭ=17.8% и Ϭ= 10.5% соответственно), но лучше показатель времени регулирования (t=0.181 c и t=0.2 c соответственно). Так как физически проще реализовать систему меньшего порядка, то в качестве КУ однозначно используем скорректированную систему.
4.3 Расширенный анализ качества скорректированной системы
4.3.1 Анализ качества системы в переходном режиме
1) Определение запасов устойчивости системы:
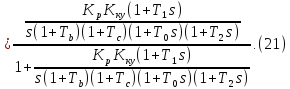
Запасы устойчивости будем проверять по ЛЧХ системы, выполненной ниже. Правило определения запасов устойчивости: запас по фазе Δφ отсчитывается по ЛФХ на частоте среза с, а запас по амплитуде Lh соответствует значению ЛАХ на критической частоте кр, взятому с обратным знаком.
Расчет выполним в MathCad (рисунок 10):

Рисунок 10 – Построение ЛХЧ скорректированной системы
Проведем расчет значений:
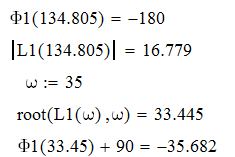
Получим значения: запас по амплитуде Lh = 16.8 дБ; запас по фазе Δφ= =35.68̊.
2) Оценка показателя колебательности:
Показатель колебательности М, представляет собой резонансное значение амплитудно-частотной характеристики замкнутой системы в относительных единицах, т.е. отношение максимальной амплитуды АЧХ к начальной ординате.

Показатель колебательности характеризует склонность систем или объектов к колебательности. Чем выше показатель колебательности, тем более колебательна система, то есть менее качественна.
Для определения этого показателя необходимо построить график АЧХ (график зависимости модуля частотной передаточной функции от частоты) и по снятым с графика значениям, определить значение показателя колебательности.
Расчет этого показателя приведен в приложении G.
По результатам проведенных расчетов, были получены численные значения параметров:
М=1.164.
Считается, что значение показателя колебательности, обеспечивающего малую колебательность системы, лежит в пределах:
1.1<М<1.3.
Полученный нами показатель укладывается в этот диапазон, следовательно, система обладает хорошими показателями по качеству.
3) Оценка прямых показателей качества по ВЧХ «вход-выход ДОС»
По ВЧХ замкнутой системы, можно определить диапазон значений прямых показателей качества системы.
Расчет этих показателей приведен в приложении H.
По результатам расчетов видно, что перерегулирование менее 20.403%. Так как ранее мы получили значение перерегулирования 17.8%, то расчет проведен
верно(полученное значение входит в диапазон).
Для оценки времени регулирования воспользуемся неравенством:
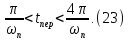
где ωп – частота положительности.
Определив ωп в приложении Е, оценим диапазон времени регулирования:
 .
.
Так как ранее мы получили значение времени регулирования 0.18 с, то расчет проведен верно (полученное значение входит в диапазон).
4) Оценка прямых показателей качества по нулям и полюсам передаточной функции замкнутой системы (корневые оценки показателей)
Оценку прямых показателей качества системы можно произвести на базе корневых показателей. Корневые показатели качества САР основаны на значениях нулей и полюсов ПФ, их расположении на комплексной плоскости. Основными корневыми показателями качества являются:
1) Степень устойчивости η – абсолютное значение действительной части ближайшего к мнимой оси полюса ПФ рассматриваемой системы. Степень устойчивости применяется для оценки быстродействия системы, т.е. времени регулирования.
2) Коэффициент колебательности μ – максимальное отношение мнимой части комплексного корня характеристического уравнения системы к действительной части. Коэффициент колебательности является оценкой запаса устойчивости системы и характеризует склонность системы к колебательным переходным процессам. Эти же свойства оценивает прямой показатель качества – перерегулирование.
Определим нули и полюса нашей функции.
Знаменатель передаточной функции соответствует характеристическому уравнению системы. Его корни – полюса передаточной функции. Нули передаточной функции - корни многочлена числителя.
Получим характеристическое уравнение замкнутой системы и найдем его корни:
![]()
![]()

Рисунок 11 – Нахождение полюсов ПФ
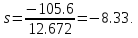
Уравнение для нулей ПФ замкнутой системы:
12.672s+105.6=0.
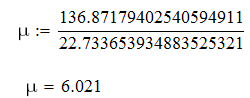
Определим степень устойчивости и коэффициент колебательности:

По величине
 оценим время регулирования, так как
ближайшему к мнимой оси полюсу
соответствует составляющая регулируемой
величины, затухающей наиболее медленно:
оценим время регулирования, так как
ближайшему к мнимой оси полюсу
соответствует составляющая регулируемой
величины, затухающей наиболее медленно:
Примем
 ,и проведем расчет:
,и проведем расчет:
По величине
 оценим перерегулирование:
оценим перерегулирование:
Истинные значения перерегулирования и времени регулирования удовлетворяют полученным диапазонам.
Полученные оценки по корневому методу и по ВЧХ системы дают очень широкий диапазон значений прямых показателей и точные значения никогда не будут известны.