

Приложение а
Проверка исходной системы требованиям ТЗ.
Получение переходной характеристики

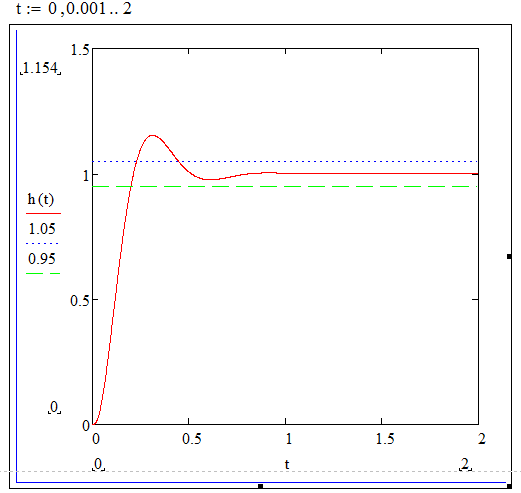
Рисунок 22 - Получение

t≈0.44c.
ПриложениеB.
Анализ устойчивости системы по критерию Найквиста.
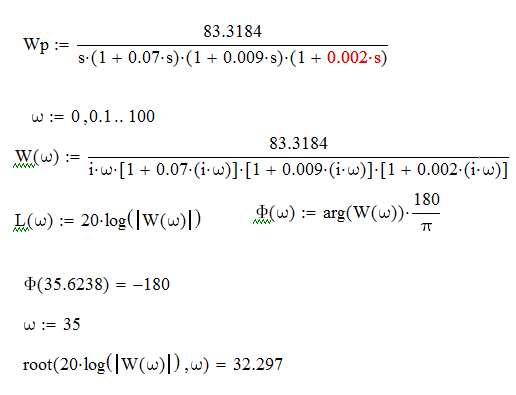
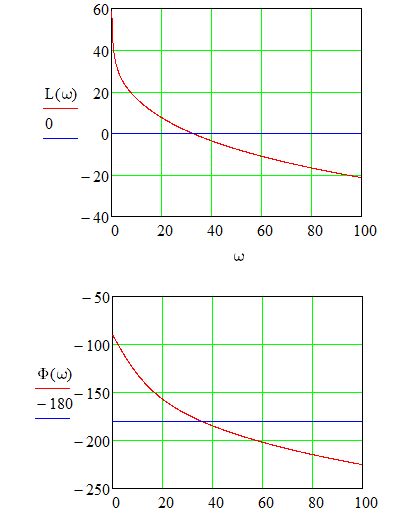
Рисунок 23 - Построение ЛАЧХ и ЛФЧХ
ПриложениеC
Проверка системы с пропорциональным регулятором требованиям ТЗ.
Получение переходной
характеристики
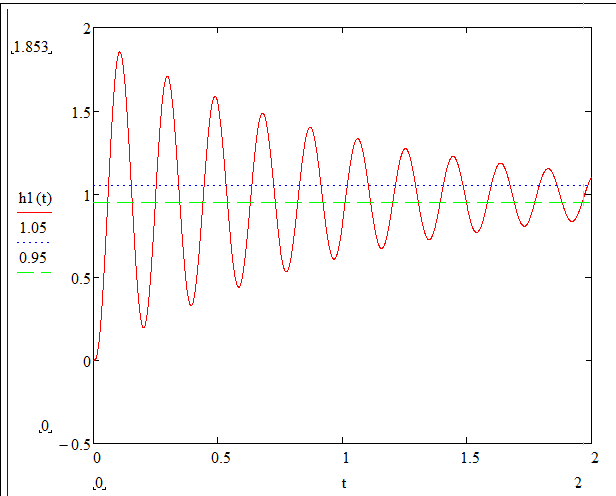
Рисунок 23 – Получение переходной характеристики при введении пропорционального регулятора

t>2c.
ПриложениеD
Определение
коэффициента усиления в ПД-регуляторе

ХУ ЗС и его коэффициенты:

Определение диапазона К по критерию Гурвица.
Необходимое условие:

2) Достаточное условие:
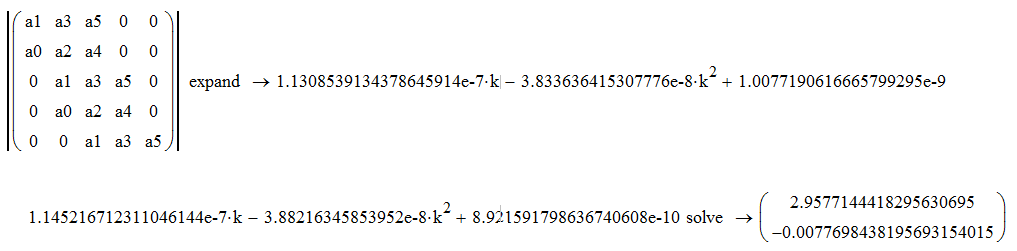
Исходя из полученных результатов, определим диапазон значений К:

ПриложениеE
Проверка системы с ПД-регулятором по прямым показателям качества.
Рассмотрим 2 случая: первый – когда выбранное значение коэффициента К обеспечивает соответствие системы ТЗ, второй – когда не соответствует.
Получение переходной характеристики и построение графика системы, соответствующей ТЗ.

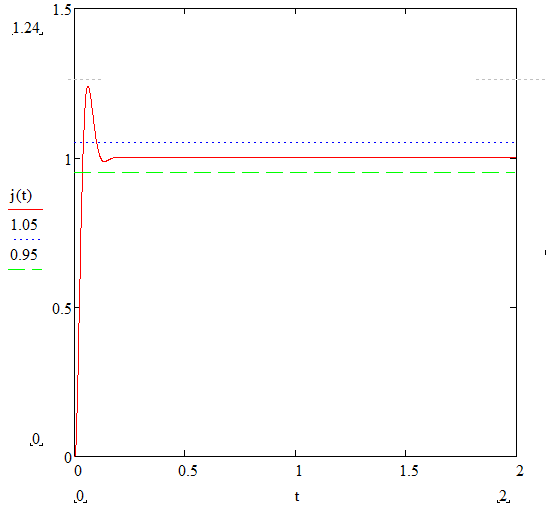
Рисунок 24 – Построение переходной характеристики с коэффициентом Кд, удовлетворяющим ТЗ

t≈0.1c
Получение переходной характеристики и построение графика системы, не соответствующей ТЗ.

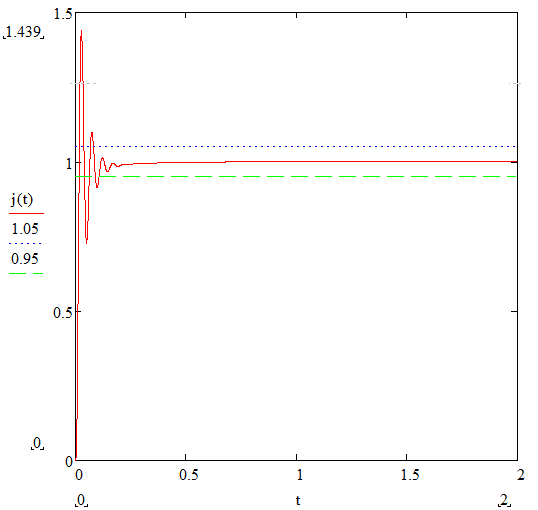
Рисунок 25 – Построение переходной характеристики с коэффициентом Кд, не удовлетворяющим ТЗ


t≈0.09c
ПриложениеF
Проверка системы, полученной по методу ЛАЧХ, по прямым показателям качества
I) Проверка неупрощенной системы
Получение переходной характеристики
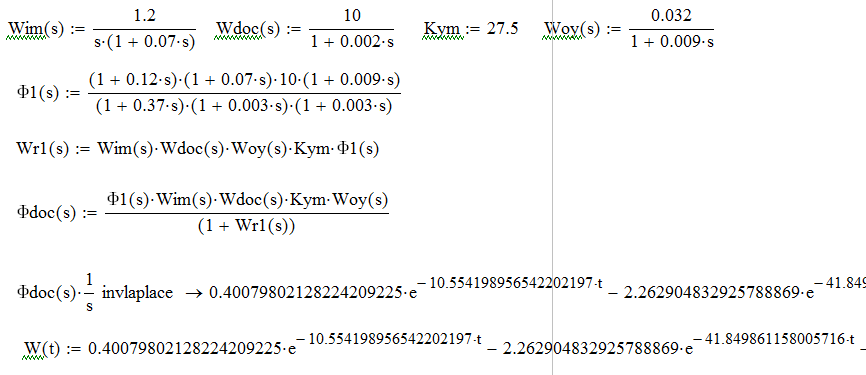
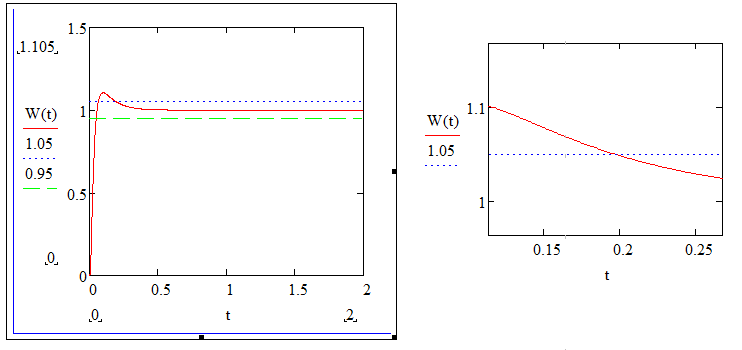
Рисунок 26 – Построение переходной характеристики скорректированной неупрощенной системы
По полученной характеристике определим:

t=0.2c
II) Проверка упрощенной системы
Получение переходной характеристики

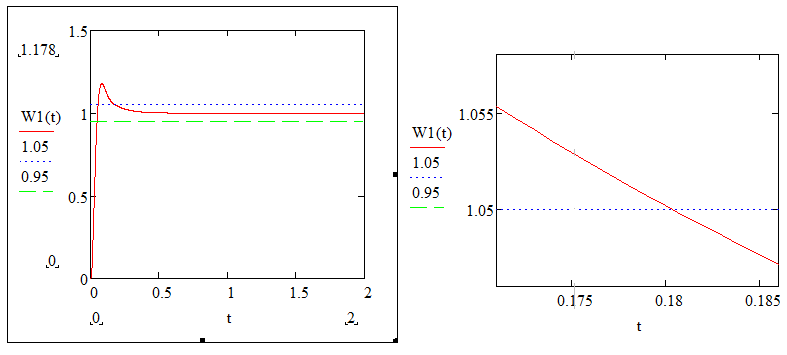
Рисунок 27 – Построение переходной характеристики скорректированной упрощенной системы
По полученной характеристике определим:

t=0.18c
ПриложениеG
Оценка показателя колебательности
Получение модуля передаточной функции по выходу ДОС
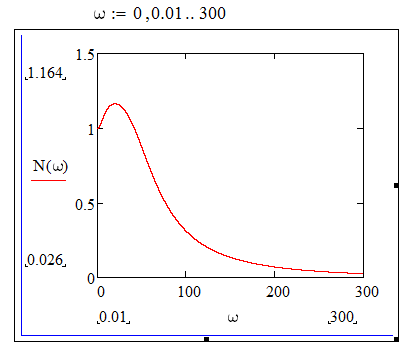
Рисунок 28 – Построение АЧХ системы

ПриложениеH
Оценка прямых показателей качества по ВЧХ
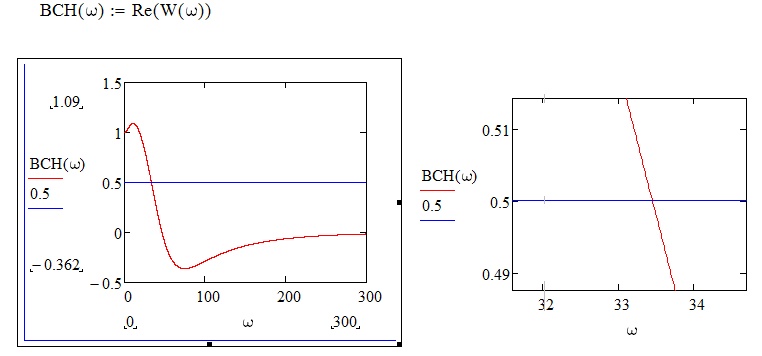
Рисунок 29 – Построение ВЧХ системы
Так как ВЧХ имеет положительный и отрицательный экстремумы, то перерегулирование можно оценить по формуле:


Определим частоту положительности:
P(ωп)=0.5Р(0)
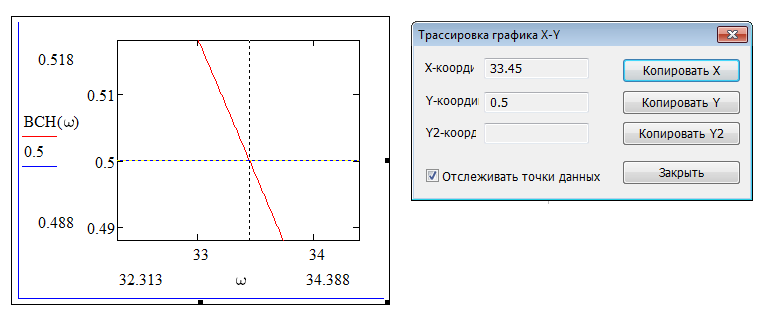
Рисунок 30 – Определение частоты положительности
ωп=33.45 Гц
ПриложениеI
Построение ПФ по выходу ОУ и ДОС.
 Построение
графиков переходных функций
Построение
графиков переходных функций
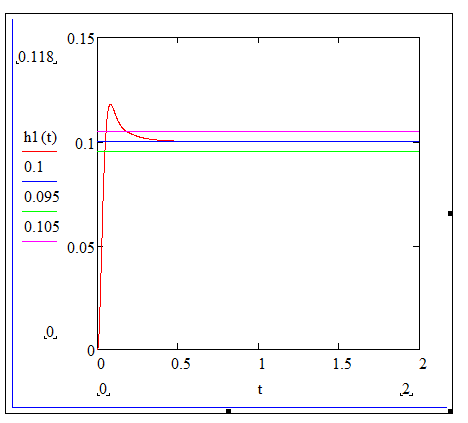
1) Переходная функция по выходу ОУ:
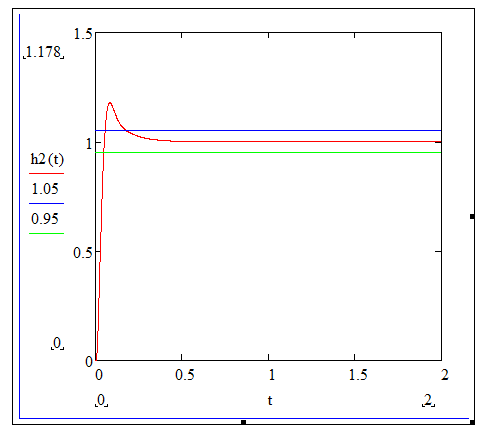
2) Переходная функция по выходу ДОС:
Определим прямые показатели качества
1) Прямые показатели качества по выходу ОУ:
перерегулирование:

время регулирования:
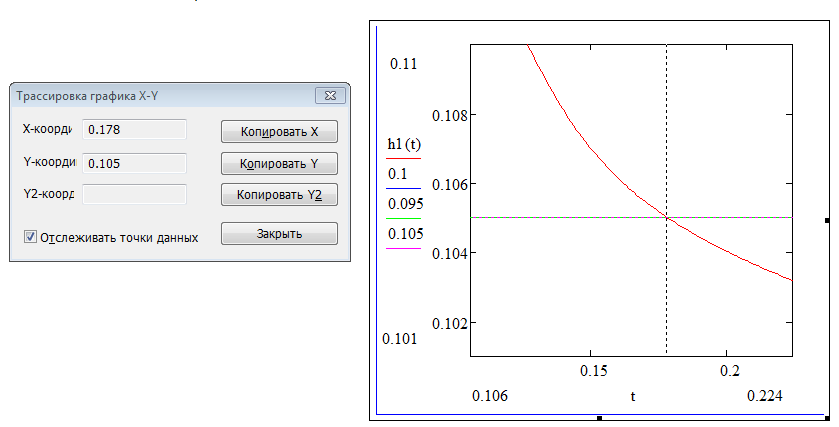
t=0.178c.
2) Прямые показатели качества по выходу ДОС:
Эти показатели определены в приложении Е.

t=0.180 c.
ПриложениеJ
Определение величины Хопо выходу УМ.
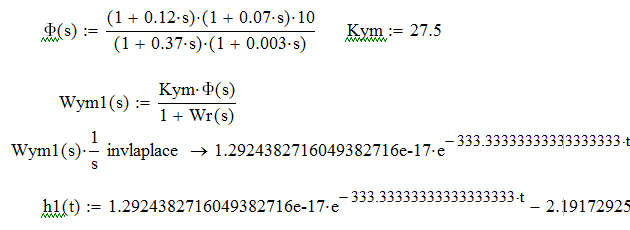
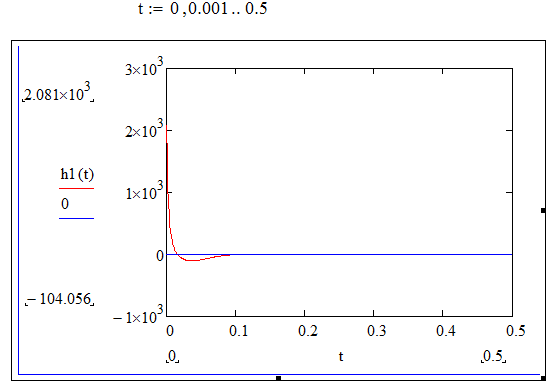
Рисунок 31 – Построение переходной характеристики по выходу УМ
hум max=2081
ПриложениеK
Определение частоты ω0
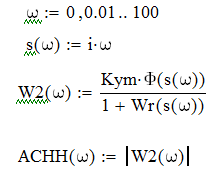
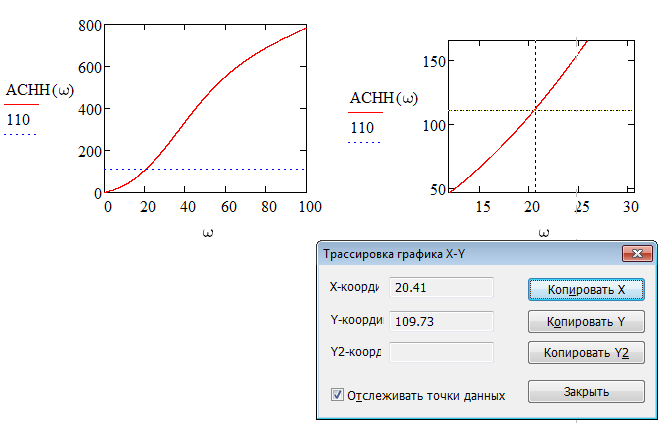
Рисунок 32 – Определение ω0по АЧХ
ω0=20.5 Гц