

1 Анализ исходной системы
1.1 Функциональная схема замкнутой системы
Функциональная схема замкнутой системы управления представлена на рисунке 2. Данная схема содержит в прямой цепи: последовательно включенные усилительно–преобразовательный элемент (УПЭ), исполнительный механизм (ИМ), объект управления (ОУ), а в цепи обратной связи: датчик обратной связи (ДОС).
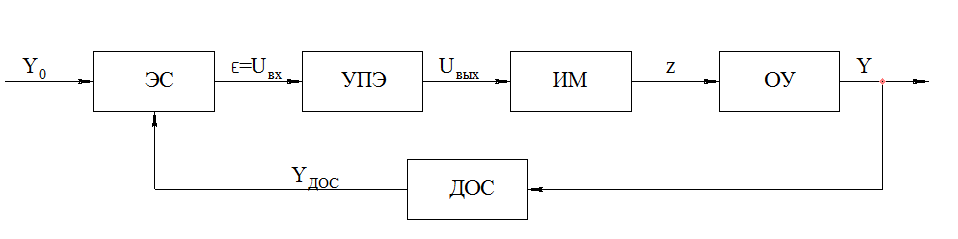
Рисунок 2 – Функциональная схема замкнутой системы управления
Функциональная схема замкнутой системы управления уровнем воды в резервуаре представлена на рисунке 3. В качестве усилительно–преобразовательного элемента (УПЭ) выступает усилитель мощности (УМ), в качестве исполнительного – выступает двигатель постоянного тока (ДПТ), в качестве объекта управления (ОУ) – резервуар, в качестве датчика обратной связи (ДОС) – потенциометр.

Рисунок 3 – Функциональная схема замкнутой системы управления уровнем воды в резервуаре
1.2 Структурная схема замкнутой системы управления
Структурная схема замкнутой системы управления представлена на рисунке 4.

Рисунок 4 – Структурная схема замкнутой системы управления
Передаточные функции ОУ, ИМ и ДОС считаются известными:

Параметры:
 Ta,Tb,Tcзаданы в техническом задании.
Ta,Tb,Tcзаданы в техническом задании.
Определим размерности всех параметров системы:

УПЭ (УМ) предполагается безынерционным, но с ограниченной зоной линейности. Статическая характеристика УПЭ представлена на рисунке 5.
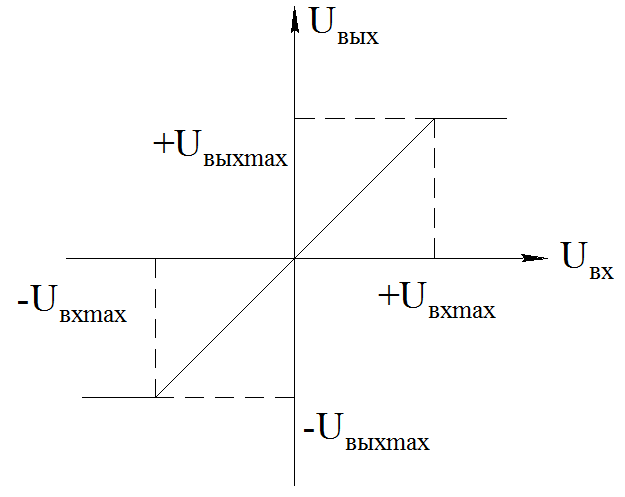
Рисунок 5 – Статическая характеристика УПЭ
Параметры: Uвхmax,Uвыхmaxзаданы в техническом задании.
На начальном этапе исследования воспользуемся линеаризацией на физическом уровне: будем считать, что усилитель мощности имеет неограниченную зону линейности. Мы можем принять это допущение, так как в процессе работы УПЭ, его выходная величина меняется в небольшом диапазоне (±4В) по линейному закону. Структурная схема линеаризованной системы представлена на рисунке 6.
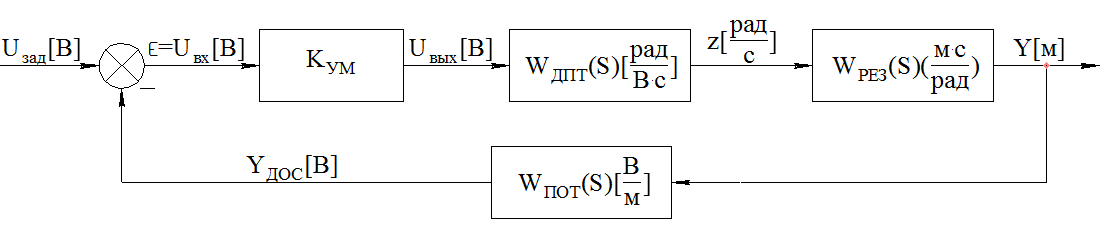
Рисунок 6 – Структурная схема линеаризованной системы
1.3 Анализ устойчивости исходной линеаризованной системы по алгебраическому критерию
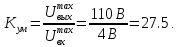
Коэффициент усилителя мощности найдем из характеристики, указанной на рисунке 5, для линейной зоны усиления:
Для проверки линеаризованной системы по алгебраическому критерию, необходимо записать характеристическое уравнение замкнутой системы. Это уравнение имеет вид:
1+Wp(s)=0. (1)
где
 (2)
(2)
С помощью программного пакета MathCad, преобразуем
характеристическое уравнение (рисунок 7):

Рисунок 7 – Преобразование ХУ ЗС
Окончательный вид ХУ ЗС:
 (3)
(3)
Так как общий вид ХУ ЗС имеет вид:
 (4)
(4)
то запишем коэффициенты ХУ ЗС:
а0=0.00000126;
а1=0.000788;
а2=0.081;
а3=1;
а4=10.56.
Полученная система – 4-го порядка. Для проверки системы по критерию Гурвица, необходимо проверить ее на выполнение необходимого и достаточного условия устойчивости.
Необходимое условие: аi>0. Это условие выполняется.
Достаточное условие: все определители Гурвица должны быть положительными. Так как система 4-го порядка, то достаточно проверить, положителен ли определитель 3-го порядка. Это следует из-за того, что определитель 4-го порядка равен произведению диагонального минора Δ3 на коэффициент а4. Так как этот коэффициент, вследствие выполнения необходимого условия устойчивости, положителен, то при записи неравенства его можно опустить.
В итоге, требуется проверить, выполняется ли условие:
 (5)
(5)
После подстановки численных значений, получим:

Достаточное условие выполняется, следовательно, замкнутая система устойчива.