

5.2 Гармонический сигнал
5.2.1 Построение графика реакции системы по выходу дос при подаче на вход системы гармонического сигнала с частотой ω0.
Используя Mathcad,
получим (рисунок 17):
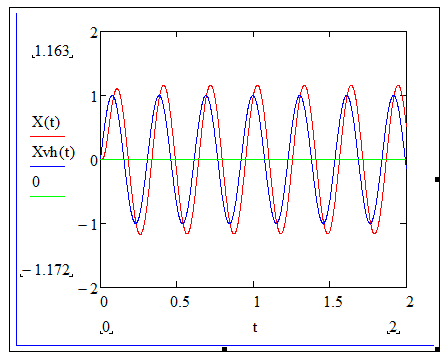
Рисунок 17 – Построение графика реакции систему на гармонический сигнал
По графику определим амплитуду выходного сигнала и временной сдвиг фаз между входным и выходным сигналами:
Как следует из полученного графика, амплитуда выходного сигнала Авых=1.163.
Определим временной сдвиг Δt- при многократном увеличении графика (рисунок 18), разница между входным и выходным сигналом равна:
Δt=0.3065-0.3362=-0.0297 c
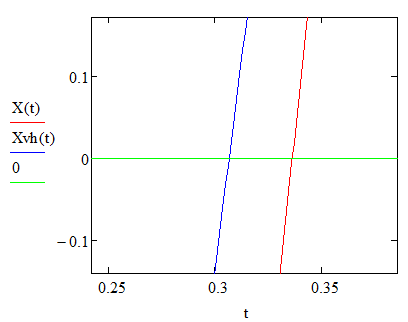
Рисунок 18 - Разница фаз между входным и выходным сигналом (увеличенный масштаб)
5.2.2. Определение афи и сравнение значений с полученными ранее
По полученным результатам (см. пункт 5.2.1) определим численные значения АФИ:
1) Коэффициент амплитудных искажений

2) Коэффициент фазовых искажений

Для определения этого коэффициента, нам потребуется период колебаний входного сигнала:

Если временной сдвиг для ДОС разделить на величину периода, то получим относительный фазовый сдвиг сигналов. Умножив полученную величину на 360˚, найдем фазовый сдвиг выходного сигнала ДОС по отношению к входному сигналу:

Как видим, значения коэффициентов искажения почти совпали. Это можно объяснить тем, что временной сдвиг для ДОС был снят с графика приблизительно, следовательно, расчет проводился с погрешностью.
6. Анализ системы с учетом нелинейности ум
6.1 Отработка ступенчатых сигналов
Рассчитаем и построим реакции системы по выходу УМ и ДОС на ступенчатый входной сигнал величины Х0, 2 Х0, 5 Х0и 1В с учетом насыщения УМ.
Моделирование и построение переходных характеристик будем проводить в программном пакете VisSim.
I)
Построим переходные характеристики по
выходу ДОС (рисунок 19).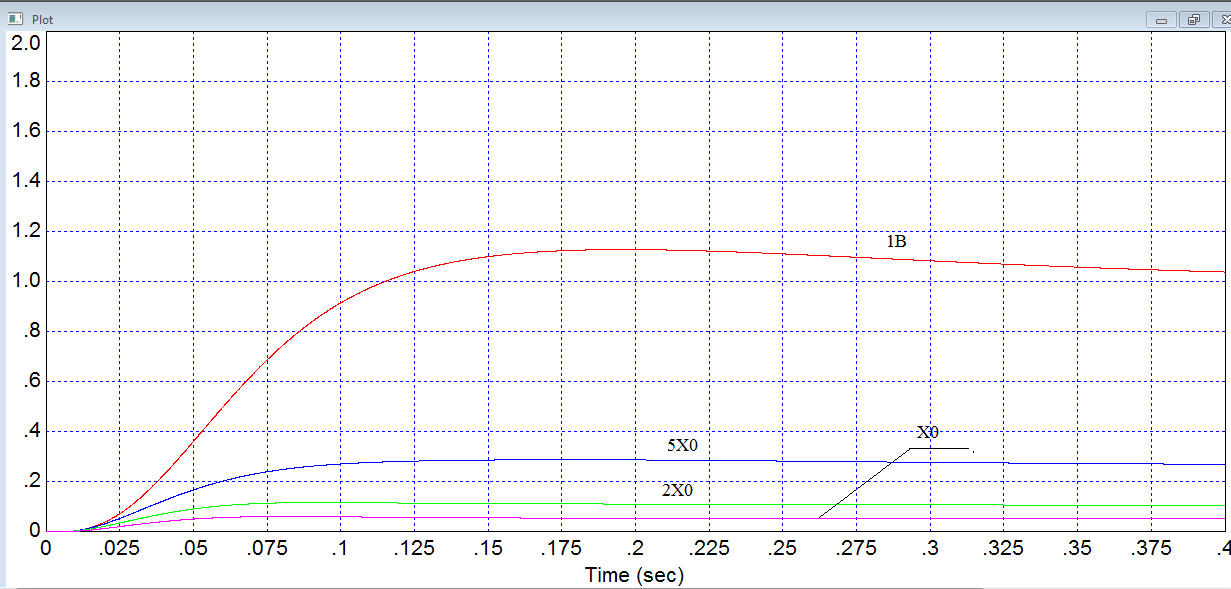
Рисунок 19 – Переходные характеристики системы по выходу ДОС
Используя данные полученные с графиков, проведем оценку ПК системы при разном уровне входного воздействия:
1) Х=Х0:

tрег=0.179 с
2) Х=2Х0:

tрег=0.22 с
3) Х=5Х0:

tрег=0.31 с
4) Х=1В

tрег=0.37 с
Проведем оценку полученных значений:
1) При увеличении амплитуды входного сигнала, увеличивается время регулирования системы. Заметим, что это возможно только в нелинейных системах. В линейных системах, уровень входного сигнала не влияет на скорость переходного процесса. Это явление можно объяснить так: так как рассматриваем нелинейность типа «насыщение», то зависимость эквивалентного коэффициента передачи такой нелинейности от амплитуды носит обратно-пропорциональный характер. Т.е. при малых амплитудах, коэффициент передачи постоянный и изображается годографом в виде горизонтальной линии.
При превышении определенного значения амплитуды, коэффициент начинает убывать, стремясь к нулю. Следовательно, снижается общий коэффициент усиления. В свою очередь, снижение коэффициента передачи вызывает сдвиг вниз ЛАХ, следовательно, частота среза смещается влево. А величина частоты среза обратно зависит от времени регулирования. Следовательно, время регулирования увеличится.
2) При оценке перерегулирования видим, что, вначале оно уменьшается, , потом снова увеличивается. Это можно объяснить так: в нелинейной системе устойчивость и показатели качества системы зависят не только от параметров системы, но и от величины входных воздействий. Т.е. для сигнала одного уровня, система будет обладать лучшими показателями качества, чем при сигнале другого уровня.
3) Сравнивая полученные значения ПК с значениями, полученными в пункте 5.2.1, отметим почти полное совпадение значений (время регулирования: 0.18 и 0.179 с; перерегулирование:17.1% и 17.3% соответственно). Разницу между полученными показателями можно объяснить неточностью расчетов и округление результатов.
II) Построим переходные характеристики по выходу УМ (рисунок 20).
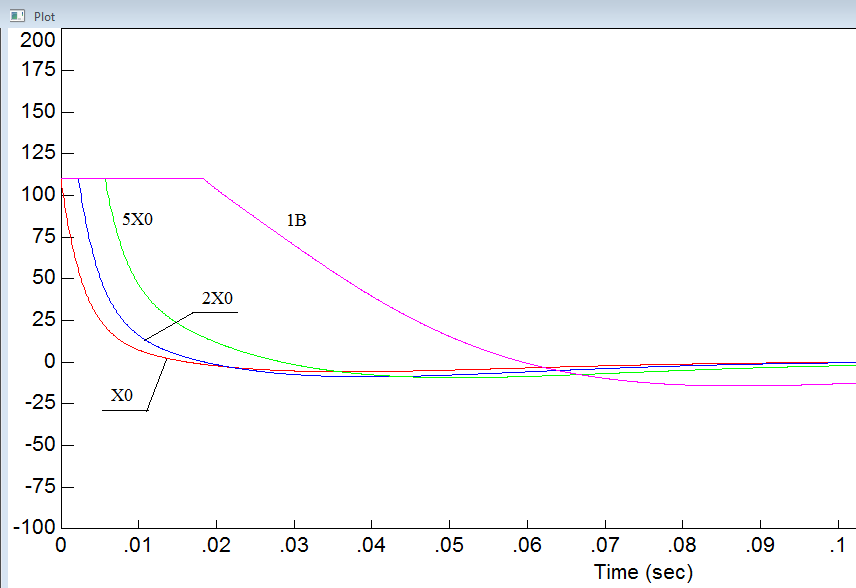
Рисунок 20 – Переходные характеристики по выходу УМ при разных уровнях входного сигнала
Анализируя полученные графики, можно выделить особенность: так как уровень ограничения у нелинейного элемента составляет 110 В, то происходит срез графиков на этом уровне. Так же можно заметить, что с увеличением значения входного сигнала, увеличивается время переходного процесса.
Отметим, что при значениях входного сигнала, меньших чем Х0, систему можно считать линейной. При превышении сигналом уровня Х0, возникают
нелинейные эффекты, негативно влияющие на работу системы.