


АННОТАЦИЯ
Мерзликин Н.Е. Пояснительная записка к курсовому проекту по дисциплине «Теория автоматического управления». – Челябинск: ЮУрГУ, МТ–363; 2014, 59 с. 31 ил., библиогр. список –2 наим., 11прил.
Цель курсовой работы – провести синтез системы в соответствии с требованиями заказчика.
Задача курсовой работы – согласно ТЗ, необходимо рассчитать автоматическое управляющее устройство (регулятор) системы, при введении которого система будет удовлетворять предъявленным к ней в техническом задании требованиям. Необходимо синтезировать корректирующее устройство, провести анализ полученной системы, а также рассмотреть способы реализации синтезированного регулятора.
При выполнении расчетов и моделирования будем использовать прикладные пакеты MathCadиVisSim. Основные расчеты вынесены в приложения, ссылки на которые присутствуют в тексте пояснительной записки.
Оглавление
ВВЕДЕНИЕ 4
1 АНАЛИЗ ИСХОДНОЙ СИСТЕМЫ 6
1.1 Функциональная схема замкнутой системы 6
1.2 Структурная схема замкнутой системы управления 7
1.3 Анализ устойчивости исходной линеаризованной системы по алгебраическому критерию 8
1.4 Анализ соответствия исходной системы требованиям технического задания 10
2. Анализ системы с пропорциональным регулятором 12
2.1 Структурная схема линеаризованной системы с пропорциональным регулятором 12
2.2 Определение коэффициента усиления пропорционального регулятора 12
2.3 Анализ устойчивости замкнутой системы по критерию Найквиста (по ЛЧХ). 14
2.4 Анализ системы с пропорциональным регулятором на соответствие ее требованиям ТЗ; вывод об эффективности проведенной коррекции 15
3 Синтез системы с типовым регулятором 16
3.1 Обоснование типа регулятора и выбор его параметров 16
3.2 Анализ системы с новым регулятором на соответствие ее требования ТЗ 17
4 Синтез системы методом ЛАЧХ 18
4.1 Описание методики синтеза 18
Получение передаточной функции КУ по полученной ЛЧХ. 22
4.2 Анализ системы на соответствие ТЗ. 23
4.3 Расширенный анализ качества скорректированной системы 24
4.3.1 Анализ качества системы в переходном режиме 24
4.3.2. Анализ системы в установившемся режиме 29
5 Отработка типовых входных сигналов 31
5.1 Единичный ступенчатый сигнал 31
5.1.1 Построение переходных характеристик системы по выходу ОУ и ДОС 31
5.1.2 Определение величины Х0 ступенчатого сигнала, при котором система работает в зоне линейности УМ. Определение прямых показателей качества при реакции системы на сигнал Х0 по выходу ОУ, ДОС 32
5.2 Гармонический сигнал 34
5.2.1 Построение графика реакции системы по выходу ДОС при подаче на вход системы гармонического сигнала с частотой ω0. 34
5.2.2. Определение АФИ и сравнение значений с полученными ранее 36
6. Анализ системы с учетом нелинейности УМ 36
6.1 Отработка ступенчатых сигналов 36
6.2 Определение возможности возникновения автоколебаний 39
Заключение 41
Приложение А 43
Приложение B. 44
Приложение C 46
Приложение D 47
Приложение E 48
Приложение F 50
Приложение G 52
Приложение H 53
Приложение I 55
Приложение J 58
Приложение K 59
Введение
В данной курсовой работе объектом для синтеза является система управления уровнем воды в резервуаре, принципиальная схема которой представлена на рисунке 1.
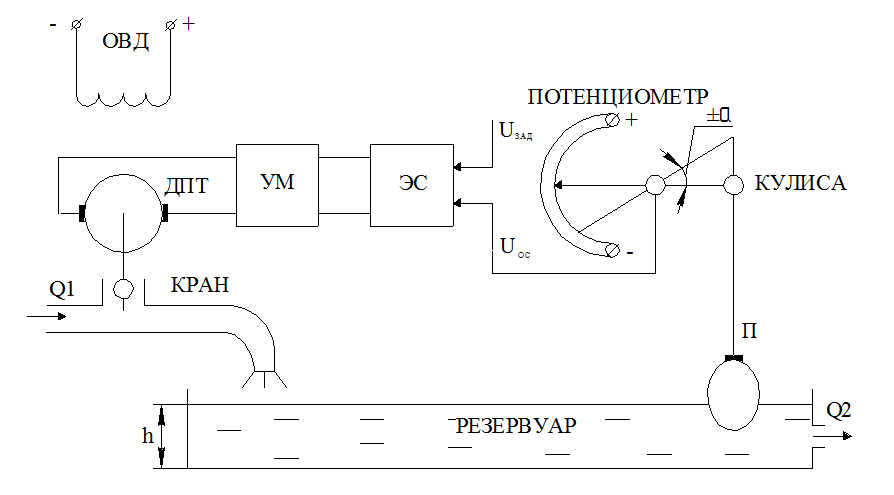
Рисунок 1 – Принципиальная схема системы управления уровнем воды в резервуаре
Объектом управления в данной системе является «РЕЗЕРВУАР» (см. рисунок 1). Регулируемый параметр – «h». Необходимое значение регулируемого параметра задается поплавком «П». Датчиком служит «ПОТЕНЦИОМЕТР». При изменении регулируемого параметра «h», поплавок перемещает «КУЛИСУ», при этом меняетсяUос. Усиленное с помощью усилителя мощности «УМ» сигналUосуправляет двигателем постоянного тока «ДПТ». Последний, вращаясь, открывает или закрывает «КРАН». С течением времени регулируемый параметр достигает заданного значения, поплавок «П» перемещает кулису в среднюю точку, сигнал на двигатель постоянного тока «ДПТ» не подается. Система приходит в равновесие.
Данная система широко применяется в металлургии (системы охлаждения выплавляемого металла) и в сельском хозяйстве (водонапорные башни).