

Левченко 2 часть
.pdf41
нованный на интегрировании приближенного дифференциального уравнения изогнутой оси балки, называемый аналитическим способом, и метод Максвелла – Мора.
Аналитический способ определения перемещений
Аналитический способ основан на интегрировании приближен-
ного дифференциального уравнения изогнутой оси балки |
(4.16) |
EIw (x) = −M (x) . |
|
′′ |
|
Здесь EI – жесткость балки при изгибе, то есть произведение модуля упругости на момент инерции. Предполагается, что эта величина не меняется по длине балки; M (x) – изгибающий момент в произволь-
ном сечении балки.
Интегрируя уравнение (4.16), мы получим умноженные на жесткость угол поворота произвольного сечения
′ |
(4.17) |
EIw (x) = −∫M (x)dx +C |
|
и прогиб произвольного сечения |
|
EIw(x) = −∫∫M (x)dxdx +Cx + D . |
(4.18) |
В формулах (4.17), (4.18) С и D – произвольные постоянные, которые находятся из граничных условий, зависящих от условий закрепления балки. Для каждой статически определимой балки можно
|
|
|
|
|
|
|
записать два граничных усло- |
|||
|
|
|
w |
|
< 0 |
ϕ < 0 |
вия для |
определения |
двух |
|
|
w > 0 |
|
произвольных постоянных. |
|||||||
|
|
|
||||||||
|
|
|
||||||||
|
|
|
|
x |
Введем правило знаков |
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
для прогиба и угла поворота |
|||
z |
ϕ > 0 |
|
|
|
|
в аналитическом методе |
оп- |
|||
|
|
|
|
ределения |
перемещений. |
|||||
Рис. 4.15. Правило знаков для перемещений |
||||||||||
Рис. 4.15 поясняет это прави- |
||||||||||
|
в аналитическом методе |
ло знаков. Согласно этому |
||||||||
|
|
|
|
|
|
|
правилу прогиб вниз (по на- |
|||
|
|
|
|
|
|
|
правлению |
оси z) считается |
||
положительным. Знак угла поворота зависит от того, где находится

42
начало отсчета х. Если начало отсчета х находится слева, как показано на рис 4.15, поворот сечения по часовой стрелке считается положительным7.
Если балка имеет n участков, то функция изгибающего моментаM (x) на каждом участке своя. В этом случае надо интегрировать n
дифференциальных уравнений и определять 2n произвольных постоянных, что очень громоздко. Если использовать специальные правила записи и интегрирования дифференциального уравнения, которые называются правилами Клебша, то число произвольных постоянных можно свести к двум, независимо от количества участков в балке. Перечислим эти правила:
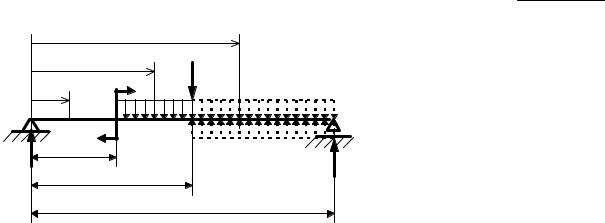
1.Начало координат для всех участков должно быть единым и находиться на конце балки (левом или правом) (рис. 4.16).
2.При составлении выражения для изгибающего момента на каждом участке рассматриваем всегда все силы с той стороны от сечения, где находится начало координат.
3.Если на балку действует распределенная нагрузка, которая обрывается в каком-то сечении балки, то ее следует продолжить до конца балки и приложить на участке, где добавлена нагрузка, распределенную нагрузку той же интенсивности, но противоположного знака (см. рис. 4.16). (Конец балки всегда противоположен выбранному началу координат.)
4.Если к балке приложена сосредоточенная пара сил M 0 , то в
выражение для изгибающего момента она входит с множителем (x −a)0 , где а – расстояние от начала координат до места приложения пары сил (см. рис. 4.16).
7 Вспомнив, что ϕ = w′(x) , можно сказать, что угол поворота положителен, если функция w(x) является возрастающей на рассматриваемом участке. Такая формулировка правила знаков для угла поворота не зависит от того, где находится начало отсчета x (слева или справа).
43
5. Интегрирование ведется без раскрытия скобок, то есть
|
|
|
x |
|
|
x |
F |
|
x |
M0 |
q |
А |
В |
||
RA |
|
a |
RB |
|
b |
||
|
|
|
|
|
|
|
l |
∫(x −a)k dx = (x −a)k +1 . k +1
Примечание. Прави-
ла Клебша справедливы, если функция q(x) , опи-
сывающая распределенную нагрузку, является линейной (в частном случае постоянной величиной).
При использовании правил Клебша изгибающий момент на каждом последующем участке
равен моменту на предыдущем участке плюс некоторая добавка, поэтому выражение для изгибающего момента принято для всех участков записывать в одну строку, отделяя участки чертой. Например, выражение для изгибающего момента в балке, показанной на рис. 4.16, с учетом правил Клебша будет выглядеть следующим образом:
M (x) = RA x |
|
I |
+ M 0 |
(x −a)0 − |
q(x −a)2 |
|
|
− F(x −b) + |
q(x −b)2 |
|
. |
|
|
||||||||||
|
|
|
|
||||||||
|
|
|
2 |
|
II |
2 |
|
III |
|||
|
|
|
|
|
|
|
|
|
|
||
Такая запись означает, что выражение для изгибающего момента на первом участке (0 ≤ x ≤ a ) содержит одно слагаемое, функция изгибающего момента на втором участке ( a ≤ x ≤ b ) имеет уже три слагаемых и, наконец, в выражение для изгибающего момента на третьем участке (b ≤ x ≤ l ) входят все пять слагаемых. Римская цифра в низу разделяющей черты показывает номер участка. В общем случае все члены, находящиеся левее черты с номером участка, входят в выражение для момента на указанном участке. Подставляя выражение для изгибающего момента в дифференциальное уравнение (4.16) и интегрируя его, найдем прогиб и угол поворота произвольного сечения. Две произвольные постоянные, возникающие при интегрировании, находим из граничных условий.
44
Приведем примеры записи граничных условий для разных балок. В балке, изображенной на рис. 4.16, на левом и правом ее концах находятся шарнирные опоры, которые запрещают вертикальные перемещения. Поэтому прогибы в точках A и B равны нулю и граничные условия для этой балки (так же, как и для балки на рис 4.14, б) будут такими:
wA = w(x = 0) = 0 ; wB = w(x = l) = 0.
Сечение А балки на рис. 4.14, а, в котором расположено жесткое защемление, не может ни перемещаться по вертикали, ни поворачиваться, поэтому граничные условия для этой балки
wA = w(x = 0) = 0 ;
ϕA = w′(x = 0) = 0.
Для консольной балки, показанной на рис. 4.14, в, следует записать такие граничные условия:
wA = w(x = a) = 0 ; wB = w(x = a +l) = 0 .
Можно показать, что для балки с произвольным числом участков при использовании правил Клебша произвольные постоянные C и D имеют следующий геометрический смысл:
C = EIw0′ = EIϕ0 ; |
(4.19) |
D = EIw0 , |
(4.20) |
где w0 и w0′ = ϕ0 соответственно прогиб и угол поворота балки в на-
чале координат. Знание геометрического смысла постоянных С и D позволяет рационально выбирать начало отсчета х и анализировать результаты. Например, при выборе начала отсчета координаты х следует помещать начало координат в тот конец балки, где есть какоенибудь закрепление. Так, в балке на рис. 4.14, а, где начало координат помещено в точку А с жестким защемлением, следует ожидать, что произвольные постоянные С и D будут равны нулю, так как в точке А не возможны никакие перемещения (ϕ0 = w0 = 0). У балки, показан-
ной на рис. 4.14, б, начало отсчета х находится в шарнирной опоре, поэтому произвольная постоянная D будет равна нулю ( w0 = 0 ), а так
как сечение в шарнире А поворачивается по часовой стрелке, то сле-

45
дует ожидать, что постоянная С будет положительна. Наконец, согласно рис. 4.14, в точка оси, расположенная в начале координат перемещается вниз, а сечение в начале отсчета х поворачивается против часовой стрелки, поэтому в соответствии с геометрическим смыслом произвольных постоянных в данной балке должно получиться, что С
< 0, а D > 0.
Метод Максвелла – Мора определения перемещений
Метод Максвелла – Мора определения перемещений является универсальным методом, справедливым, в отличие от рассмотренного выше аналитического способа, не только для балок, но и для любых стержневых систем. Чтобы понять сущность метода Максвелла – Мора, введем понятия обобщенной силы и обобщенного перемещения [2]. Обобщенной силой называется любое однопараметрическое силовое воздействие: это может быть и сосредоточенная сила, и сосредоточенный момент, и распределенная нагрузка, и группа сил, связанных между собой. Обобщенным перемещением, соответствующим заданной обобщенной силе, называется то перемещение, на ко-
тором обобщенная сила совершает ра- |
а |
|
|
F–о.с. |
|
|
|
|
|||||
боту. Приведем два самых важных для |
|
A |
|
|
|
||||||||
|
|
|
|||||||||||
|
|||||||||||||
практики примера. Если обобщенной |
|
|
|
|
|
|
|
|
|
|
|
w-о.п. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
силой (о.с.) является вертикальная со- |
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
М–о.с. |
|||||||
средоточенная сила, приложенная в точ- |
|
|
B |
|
|
|
|||||||
|
|
|
|
|
|||||||||
ке А балки, то соответствующим этой |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
силе обобщенным перемещением (о.п.) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
является перемещение по направлению |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ-о.п. |
|||||||||
этой силы, то есть прогиб в точке А |
|
Рис. 4.17. Два варианта |
|||||||||||
(рис. 4.17, а), так как именно на таком |
|
обобщенных сил |
|||||||||||
перемещении сила F совершает работу. |
|
и соответствующих им |
|||||||||||
Если обобщенной силой является со- |
|
обобщенных перемещений |
|||||||||||
средоточенная пара сил, приложенная в точке В, то обобщенным перемещением, соответствующим этой обобщенной силе, будет угол поворота в сечении В (рис. 4.17, б).
Запишем приближенную формулу Максвелла – Мора, которая используется для определения перемещений в изгибаемых плоских
46
стержневых системах и не учитывает влияния на перемещения продольной и поперечной сил:
δi |
= ∫ |
M Mi |
dx . |
(4.21) |
|
||||
В этой формуле δi – |
|
EI |
|
|
искомое обобщенное перемещение (это |
||||
может быть и прогиб, и угол поворота любого сечения); М – изгибающий момент от заданной нагрузки; Мi – изгибающий момент, вызванный единичной обобщенной силой, соответствующей искомому перемещению; EI – жесткость стержня при изгибе (произведение модуля упругости на момент инерции). Интегрирование в формуле Максвелла – Мора ведется по длинам всех стержней конструкции (по длинам всех участков балки).
Таким образом, чтобы воспользоваться формулой Максвелла – Мора, надо:
1)определить изгибающий момент на каждом участке от заданной нагрузки;
2)освободить конструкцию от заданной нагрузки и загрузить ее единичной обобщенной силой, соответствующей искомому перемещению, то есть:
•если мы хотим определить вертикальное перемещение ка- кой-то точки, то в этой точке следует приложить сосредоточенную силу, положить ее равной единице и найти изгибающий момент, вызванный действием только этой силы;
•если требуется найти угол поворота какого-то сечения, то в этом сечении надо приложить сосредоточенную пару, равную единице, и найти изгибающий момент от этой пары;
3)подставить произведение изгибающих моментов от нагрузки
иот единичной обобщенной силы в интеграл (4.21) и проинтегрировать по всей длине конструкции.
Введем правило знаков в методе Максвелла – Мора: полученный по формуле Максвелла – Мора положительный знак перемещения показывает, что искомое перемещение происходит по направлению, совпадающему с принятым направлением единичной обобщенной силы, отрицательный знак перемещения говорит о том, что точки

47
оси перемещаются (сечения поворачиваются) в сторону, противоположную направлению единичной обобщенной силы.
Очень распространенным способом интегрирования формулы Максвелла – Мора является способ графического интегрирования, называемый правилом Верещагина. Для того, чтобы воспользоваться правилом Верещагина, надо построить графики функций М и M i ,
входящих в подынтегральное выражение формулы Максвелла – Мора. Такими графиками являются эпюры М и Mi . Операция интегри-
рования формулы Максвелла – Мора с помощью правила Верещагина носит название "перемножение эпюр". Правило Верещагина состоит
вследующем:
1.Разбиваем эпюру М на простые фигуры, для которых известно положение центра тяжести (прямоугольники, треугольники и т. п.)8.
2.Находим площади этих фигур ωk . При определении площадей
учитываем знаки ординат.
3.Под центрами тяжести этих фигур находим ординаты ηk на эпюре M i (с учетом знаков).
4.Искомый интеграл будет равен (при постоянной жесткости балки EI = const ) сумме произведений площадей ωk на соответст-
вующие им ординаты под центрами тяжести ηk , то есть
|
1 |
∫M M i dx = |
1 |
n |
|
δi = |
|
|
∑ωk ηk , |
(4.22) |
|
EI |
|
||||
|
|
EI k=1 |
|
||
где n – количество фигур, на которые разбита эпюра М. Примечание. Та эпюра (чаще всего M i ), на которой ищем орди-
нату под центром тяжести, должна быть обязательно линейна на всем участке перемножения.
8 Если обе перемножаемые эпюры линейны, то безразлично, какую эпюру разбивать на простые фигуры – М или Мi.
48
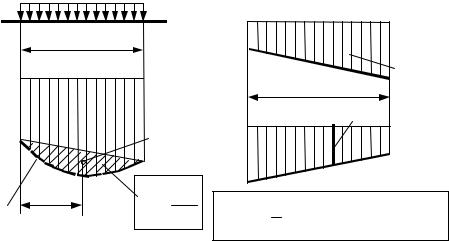
В заключение приведем некоторые формулы, которые удобно использовать при перемножении эпюр. Если на участке балки действует равномерно распределенная нагрузка, то, как известно, эпюра изгибающих моментов на этом участке является квадратной параболой. Площадь сегмента, ограниченного квадратной параболой и показанного на рис. 4.18, а, вычисляется по формуле
ω= |
ql3 |
, |
(4.23) |
|
12 |
||||
|
|
|
а центр тяжести этой фигуры находится посередине, независимо от |
|||||
а |
q |
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эпюра М |
l |
|
a |
|
|
b |
|
|
|
|
|
|
|
Эпюра М |
l |
|
ω |
|
|
|
|
|||
|
|
|
|
η |
Эпюра Мi |
|
Ц.т. |
|
|
|
|
|
c |
|
|
d |
|
|
|
|
|
|
|
l/2 |
ql3 |
ω η= l |
|
|
|
Квадратная |
ω = 12 |
(2ac + 2bd + ad + bc) |
|||
парабола |
|
6 |
|
|
|
|
|
|
|
|
|
Рис. 4.18. Некоторые полезные формулы для перемножения эпюр
угла наклона секущей. Если обе перемножаемые эпюры линейны и представляют собой трапеции (рис. 4.18, б), то, чтобы не разбивать эти трапеции на треугольники и прямоугольники, удобно воспользоваться формулой перемножения трапеций
ω η= |
l |
(2ac +2bd +ad +bc), |
(4.24) |
|
|||
6 |
|
|
|
где ординаты a, b, c и d на эпюрах М и Мi показаны на рис. 4.18, б (берутся с учетом знаков); l – длина перемножаемого участка эпюр.
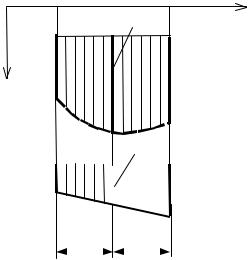
Вторым способом графического интегрирования формулы Максвелла – Мора является способ, использующий формулу Симпсона. Эта формула полу-
49
a b
x
M1
Эпюра М
M(x) |
M0 |
M2 |
|
|
|
|
|
|
Mi1 |
Эпюра Мi |
||
Mi0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
Mi2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чена из известной в математике формулы Симпсона приближенного интегрирования путем деления участка интегрирования на два отрезка. Если подынтегральные функции М и Мi – линейные или квадратные параболы, то формула Симпсона дает точное значение интеграла. Приведем эту формулу, применяемую для перемножения эпюр,
/2 |
|
l/2 |
|
|
|
|
|
||
|
l |
b |
|
l |
|
|
|||
|
|
|
|
|
M Midx = |
(M 0 Mi0 +4M1Mi1 + M 2 Mi2 ) |
|||
|
|
|
|
|
∫ |
||||
Рис. 4.19. Пояснения к формуле |
|
||||||||
a |
6 |
|
|
||||||
|
Симпсона |
|
. |
(4.25) |
|||||
|
|
|
формуле l = b −a |
||||||
В написанной |
– длина участка интегрирования; |
||||||||
M0 , Mi0 и M2 , Mi2 |
– значения крайних ординат на эпюрах М и Мi; M1, Mi1– |
||||||||
ординаты на эпюрах М и Мi, вычисленные в середине участка перемножения
(рис. 4.19).
Примеры решения задач
Определение перемещений в балках аналитическим способом
Пример 1
Условие задачи
Для балки, показанной на рис. 4.20, а, требуется найти прогиб в сечении С, угол поворота в сечении В аналитическим способом и проверить условие жесткости, если допускаемый прогиб равен l/200. Балка выполнена из дерева и имеет поперечное сечение из трех бревен радиусом 12 см. (Подбор сечения этой балки см. в разд. 4.1.2, пример 1.)
50
Решение
Для определения перемещений балки аналитическим способом составим дифференциальное уравнение изогнутой оси (4.16), используя правила Клебша записи выражения для изгибающего момента. Начало координат в рассматриваемой задаче рациональнее выбрать справа (в заделке). Распределенную нагрузку q2 , которая не доходит
до левого конца балки, продлим до сечения С (рис. 4.20, в). Выражение для изгибающего момента будет иметь такой вид:
M (x) = M |
A |
+ R |
A |
x |
|
|
|
− M (x −1)0 |
+ q |
|
(x −1)2 |
− F (x − 2) − |
|||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
I |
|
|
2 |
2 |
|
2 |
||
|
|
|
|
|
|
|
|
|
|
||||||||
|
(q |
+ q |
2 |
)( x − 2) |
2 |
|
|
|
|
|
|
|
|
II |
|||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
− |
1 |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
III |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставим это выражение в дифференциальное уравнение (4.16) и проинтегрируем его два раза:
|
′′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(x −1) |
0 |
|
|
(x −1) |
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
EIw |
(x) |
= −M A − RA x |
|
I + M |
|
− q2 |
2 |
|
|
|
+ F2 (x − 2) + |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
(q |
|
+ q |
2 |
)(x − |
2)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
+ |
1 |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(x −1)3 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
EIw |
(x) = C − M Ax − RA |
|
|
|
+ M (x −1) − q2 |
|
|
|
|
|
|
|
+ |
|
|
|
|
|||||||||||||||||||||||||||||
2 |
|
|
|
6 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
(x − 2) |
|
|
|
|
(q + q |
2 |
|
)( x − |
2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
+ F |
|
|
|
|
|
|
+ |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
x3 |
|
|
|
|
(x −1)2 |
|
|
|
|
(x −1) |
4 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
EIw(x) = D +Cx − M A |
|
|
|
− RA |
|
|
|
|
|
|
+ M |
|
|
|
|
|
− q2 |
|
|
|
|
+ |
||||||||||||||||||||||||
2 |
|
6 |
|
|
|
2 |
|
|
24 |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
II |
||||||||||
|
|
|
(x − 2) |
3 |
|
|
|
(q + q |
2 |
|
)( x − 2) |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
+ F |
|
|
|
|
|
+ |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
6 |
|
|
|
|
|
|
|
|
|
24 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|