

13. Внешние и регулировочные характеристики реверсивных преобразователей с раздельным управлением. Достоинства и недостатки реверсивных преобразователей с раздельным управлением.
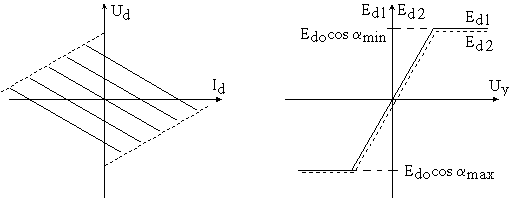
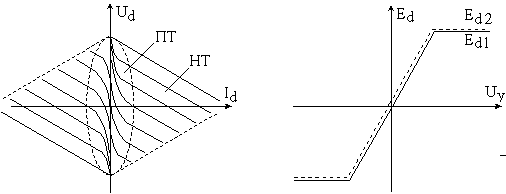
Статические характеристики преобразователя с раздельным управлением представлены на рисунке 3.45.
I + II = 180эл. – раздельное несогласованное управление;
I + II > 180эл. – раздельное согласованное управление, что представлено на рисунке 3.45.
Достоинство – отсутствие уравнительных реакторов в силовой цепи.
Недостатки:
- меньшее быстродействие, чем в преобразователях с совместным управлением, т.к. процессы в реверсивных комплектах протекают последовательно;
- наличие зоны прерывистых токов, что вызывает нелинейность внешних характеристик.
а)
б)
Рисунок 3.45 – а)
внешняя характеристика;
б) регулировочная
характеристика
При совместном управлении импульсы поступают на оба комплекта тиристоров.
Рассмотрим принцип работы на примере 3-х фазного нулевого преобразователя (см. рисунок 3.46).
Рисунок 3.46
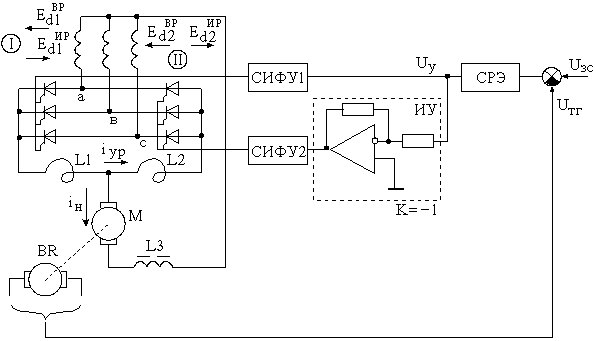
а) если Uу = 0, то 1 = 01 , 2 = 02.
1 + 2 = 180эл. – совместное согласованное; 1 + 2 >180эл. – совместное несогласованное;
б) если Uу > 0, то 1 ВР (1 < 01) , 2 ИР (2 > 02);
в) если Uу < 0, то 1 ИР (1 > 01) , 2 BР (2 < 02).
L1, L2 – уравнительные реакторы, которые ограничивают на допустимом уровне уравнительный ток, который протекает всегда в одном направлении от (I) к (II) минуя цепь нагрузки.
Уравнительные реакторы могут быть насыщающиеся и ненасыщающиеся. Первые легче и насыщаются только током нагрузки, вторые – одновременно выполняют роль сглаживающего дросселя, большие габариты.
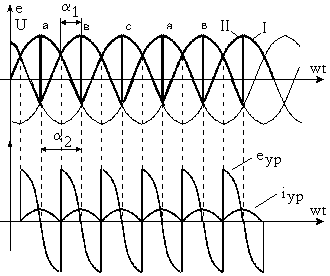
Диаграмма уравнительных токов и напряжений представлена на рисунке 3.47, где
1 = 60эл. (ВР),
2 = 120эл. (ИР),
1 + 2 = 180эл.
Еd1 = Ed0cos1;
Еd2 = Ed0cos2 = Ed0cos(180 - 1) =
= –Ed0cos1, т.е. Ed1 = Ed2;
еур = е1–е2 = ел.
15. Причины статического уравнительного тока и способы его ограничения. Внешние и регулировочные характеристики реверсивного преобразователя с совместным согласованным и несогласованным управлением.
Причина статических уравнительных токов заключается в неравенстве мгновенных ЭДС комплектов. При совместном согласованном управлении (+) и (–) площади одинаковы, поэтому уравнительный ток имеет гранично-непрерывный характер.
При любом согласовании реверсивных комплектов ЭДС первого комплекта не должна превышать по модулю ЭДС второго комплекта, в этом случае в уравнительной ЭДС будет отсутствовать постоянная составляющая и поэтому ограничение уравнительного тока можно обеспечить за счет включения только индуктивных элементов.
iур 30%Iн.
В каждый момент времени к нагрузке подключен тот или иной комплект (неработающий в данный момент комплект прогружен только Iур). Если ЭП в двигательном режиме, то к нагрузке подключен выпрямительный комплект, если в тормозном режиме, то инвертирующий комплект (см. рисунок 3.48).
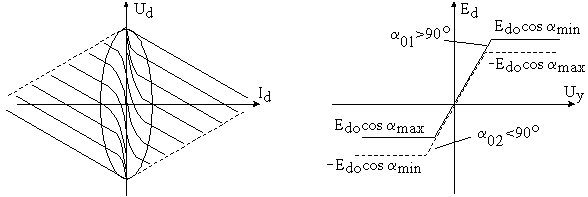
Рисунок 3.48 –
Внешние и регулировочные характеристики
при совместном несогласованном
управлении
Рисунок 3.49 –
Внешние и регулировочные характеристики
при совместном несогласованном
управлении
0 (1,2) = 900эл. (min = –max) – совместное согласованное управление;
0 (1,2) > 900эл. – совместное несогласованное управление.
16. Особенность протекания динамических режимов в реверсивном преобразователе с совместным управлением. Причины динамического уравнительного тока и способы его ограничения. Достоинства и недостатки реверсивных преобразователей с совместным управлением.
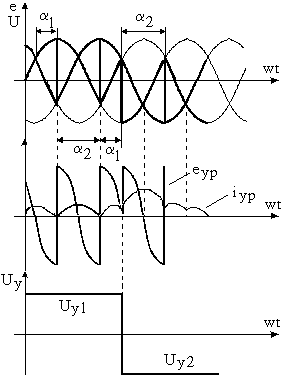
Из-за неодинаковости перехода в ВР и в ИР в преобразователях с совместным управлением имеет место динамический уравнительный ток (см. рисунок 3.50).
На рисунке при Uу1 2 = 1200эл., 1 = 600эл., при Uу2 1 = 1200эл., 2 = 600эл. В ИР комплект переходит по синусоиде, а в ВР практически мгновенно. Это вызывает в еур нескомпенсированной площади S(+), которая вызывает бросок тока Iур дин > 2Iст др.
Для уменьшения Iур дин на входе СИФУ (на выходе системы регулирования) ставят фильтр с постоянной времени (57)мс, который сглаживает скачки сигнала управления Uу. В этом случае переход в ВР затягивается, неодинаковость выравнивается и исключается причина, вызывающая Iур дин. Но при этом снижается быстродействие реверсивного преобразователя в целом.
Рисунок 3.50
Достоинства:
- при совместном согласованном управлении отсутствует зона ПТ, внешние характеристики линейны и однозначны регулировочные;
- максимальное быстродействие;
- при совместном несогласованном управлении меньшее значение Iур, меньше габариты уравнительных реакторов.
Недостатки:
- наличие Iур и уравнительных реакторов в силовой цепи;
- невозможно предельное использование преобразователей по установленной мощности (из-за связи min = –max).
Область применения – ЭП с малой и средней мощностью, где требуется быстродействие.