

Сельсинный задатчик
Сельсины применяются в ЭП с напряженным режимом работы.
Бывают два типа: СКАП – сельсинный командоаппарат педальный; СКАР – сельсинный командоаппарат ручной.
Принцип действия одинаковый.
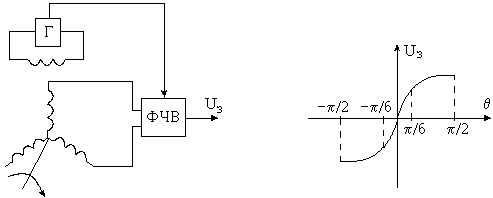
Сельсины в этих устройствах работают в трансформаторном режиме (см. рисунок 3.82).
 Рисунок
3.82
Рисунок
3.82
На рисунке приняты обозначения: Г – генератор; ФЧВ – фазочувствительный выпрямитель.
< /6 – линейная зависимость.
Такие сельсинные задатчики широко применяются в качестве задающих устройств ЭП, работающих в агрессивных средах.
III. Замкнутые системы аэп постоянного тока.
1. Принципы построения замкнутых систем аэп. Виды обратных связей.
В замкнутых системах АЭП имеются каналы связи, по которым в систему поступает информация о фактическом значении регулируемой величины, а также информация о возмущающем воздействии.
Все замкнутые системы могут быть в 3-х принципах работы:
- по отклонению (имеются каналы, по которым передается информация о фактическом значении регулируемой величины);
- по возмущению (положительная обратная связь, с помощью которой компенсируется возмущающее воздействие);
- комбинированные.
По характеру действия обратные связи (ОС) бывают:
а) жесткие;
б) гибкие.
Жесткие обратные связи действуют в статике и динамике, их сигнал пропорционален контролируемой величине.
Uдос = А.
Сигнал гибкой обратной связи пропорционален производной контролируемой величины и действует только в переходных процессах.
![]() .
.
По направлению действия:
а) положительные Uз Uдос;
б) отрицательные Uз Uдос.
Все системы АЭП бывают одноконтурные или многоконтурные.
2. Принципиальная схема одноконтурной системы аэп с упреждающим токовым ограничением. Работа схемы, область применения.
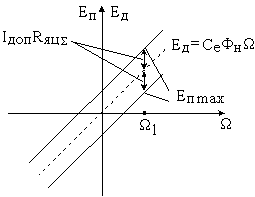
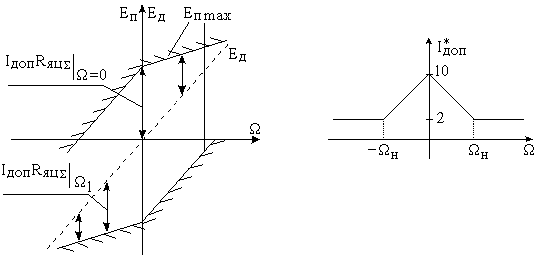
В этой системе ограничение тока осуществляется без его непосредственного измерения за счет ограничения разности ЭДС преобразователя и двигателя на допустимом уровне при любой скорости.
Еп – Ед IдопRяц
Если скорость = const любая, то ограничение называется линейным (см. рисунок 4.12). Применяется в ЭП с двигателями обычного исполнения.
Рисунок 4.12
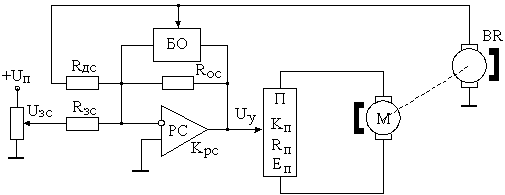
Поддержание требуемой разности между Ед и Еп осуществляется за счет ограничения на соответствующем уровне (для данной скорости) сигнала управления на входе преобразователя (см. рисунок 4.14).
Еп = кпUупр.
На рисунке 4.14 принято обозначение: БО – блок ограничения (линейный).
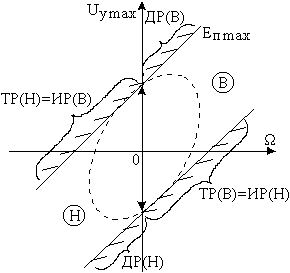
Статические характеристики системы представлены на рисунке 4.15, где приняты обозначения: ДР, ТР – двигательный и тормозной режимы; ИР – инверторный режим.
 Рисунок
4.13
Рисунок
4.13
3. Достоинства и недостатки одноконтурных систем аэп. Область применения.
одноконтурной системы АЭП с отрицательной обратной связью по напряжению
Физический смысл действия отрицательной обратной связи по напряжению состоит в том, что она компенсирует падение напряжения в преобразователе и в идеале (при к1к2к3 ) обеспечивает питание двигателя как бы от источника с нулевым внутренним сопротивлением.