

17. Регуляторы как элементы замкнутых систем аэп. Основные схемы включения операционных усилителей и области их применения.
Регуляторы предназначены для суммирования задающего сигнала и сигналов обратной связи, а также для формирования статических и динамических характеристик замкнутой системы.
Регуляторы строятся на операционных усилителях (ОУ) в интегральном исполнении. ОУ имеет пять основных выводов (см. рисунок 3.51):
- два для входных сигналов;
- один выходной;
- два для подключения к источнику питания.
При работе в линейном режиме Uвх = Uвх(–) – Uвх(+) 0. При напряжении питания 15В напряжение насыщения Uнас = 13В (см. рисунок 3.52).
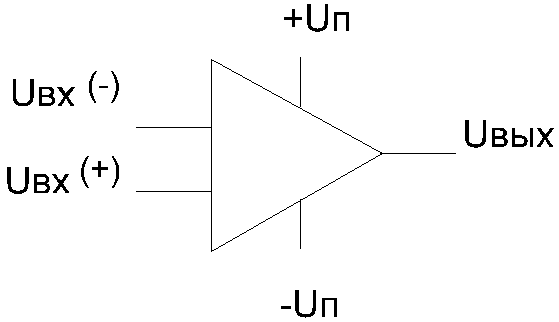
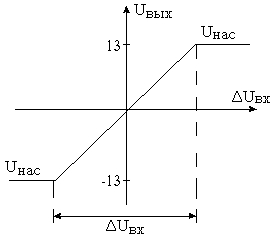
Рисунок 3.51 Рисунок 3.52
![]() .
.
Пример – пусть Коу = 26000 (10000 Коу 100000)
![]() 1мВ
– перевод ОУ с одного уровня на другой.
1мВ
– перевод ОУ с одного уровня на другой.
Основные схемы включения оу
Б)
Рисунок 3.53
Правила для анализа схем ОУ:
- Uвх 0 (т.к. Коу );
- по входу ОУ не потребляет ток Iвх = 0 (т.к. большое входное сопротивление Rвх ).
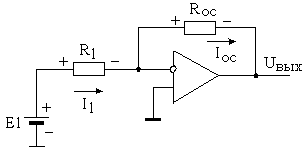
Инвертирующее включение
а) В соответствии с рисунком 3.53а, напряжение на выходе ОУ
![]() ,
,
где
![]() – на инвертирующем входе.
– на инвертирующем входе.
Uвых = –Ioc Roc (т.к. Uвх = 0),
где Ioc
= I1
(т.к. Rвх
оу = );
![]() (т.к.Uвх
= 0).
(т.к.Uвх
= 0).
Тогда
![]() .
.
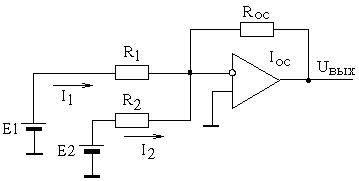
б) Инвертирующий сумматор (рисунок 3.53б)
Во входной цепи два независимых контура и I1 не влияет на I2 (см. рисунок 3.54). Выходной сигнал Uвых находится методом суперпозиции.

Рисунок 3.54
![]() ,
,
где
![]() ;
;![]() .
.
Коэффициент передачи по каждому входу разный К1, К2 и К1 = К2 только при равенстве входных сопротивлений
К1 = К2, если R1 = R2.
Инвертирующее включение применяется:
- для масштабного преобразования и инверсии сигнала;
- для суммирования сигналов с инверсией.
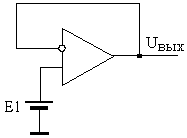
Неинвертирующее включение
а) Изолирующий повторитель (рисунок 3.55а)
Uвых = Е1 (Uвх = 0)
б) Неинвертирующий усилитель (рисунок 3.55б)
Uвых = IocRoc + I1R1,
где Ioc = I1 (т.к. Rвх = ); I1 = E1/R1 (Uвх = 0).
Uвых = E1/R1(Roc + R1) = E1(Roc/R1 + 1) = K(+)E1,
где К(+) – коэффициент усиления.
![]() ;
;
![]() .
.
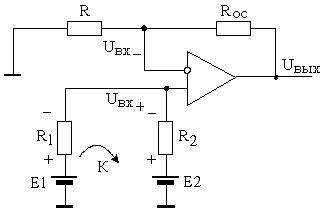
в) неинвертирующий сумматор (рисунок 3.55в)
Uвых = Uвх(Roc/R + 1) = {Roc = R} = 2Uвх (+).
Uвх (+) = ?
Контур К (см. рисунок 3.55в): E1 – E2 = I(R1 + R2);
![]() ;
;
![]() при R1=R2;
при R1=R2;
![]() .
.
Если R = R1 = R2 = Roc , то Uвых = Е1 + Е2.
В данном случае источники входных сигналов Е1, Е2 действуют друг на друга, чего нет в системах с инвертирующим включением.
Применяются для масштабного преобразования и суммирования сигнала без инверсии.
в)
Рисунок 3.55
а)
б)

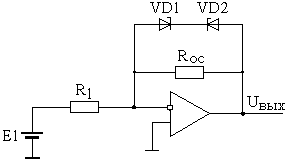
18. Схемы включения оу с ограничением входного сигнала
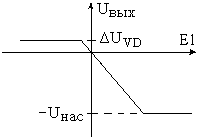
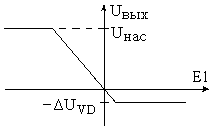
Ограничение выходного сигнала используется для ограничения величины задающего входного сигнала на внутреннем контуре регулирования в системах с подчиненным регулированием параметров.
Схемы включения с нерегулируемым ограничением входного сигнала
В соответствии с рисунком 3.56, ограничение осуществляется за счет введения нелинейных элементов в цепь обратной связи ОУ.
а)
б)
в)
Рисунок 3.56
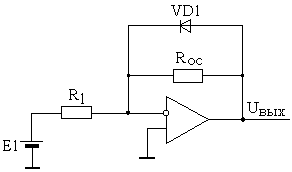
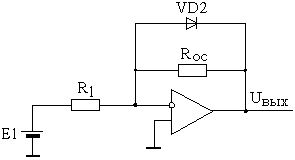
![]() ;
;
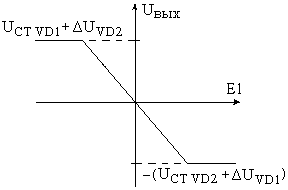
–(UCT VD2 + UVD1) Uвых UCT VD1 + UVD2,
где Uст – напряжение стабилизации;
UVD – падение напряжения на диоде (UVD 1В).