

4. Полная развернутая структурная схема двигателя для двухзонного аэп с суммированием моментов.
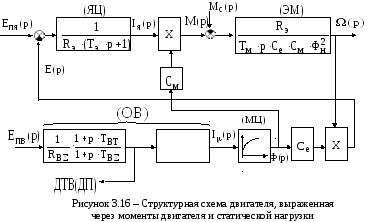
Структурная схема двигателя, выраженная через момент двигателя и момент статической награзки более удобна и применяется чаще (см. рисунок 3.16).
![]()
Уравнение равновесия моментов

Несмотря на то, что коэффициент в электромеханической части двигателя на данной структурной схеме постоянен коэффициент передачи в контуре регулирования скорости будет уменьшаться при ослаблении потока.
5. Электромашинные преобразователи как элементы замкнутых систем аэп.
В качестве силовых преобразователей в
системах АЭП постоянного тока применяются
преобразователи следующих групп:
качестве силовых преобразователей в
системах АЭП постоянного тока применяются
преобразователи следующих групп:
а) электромашинные преобразователи
1) генератор постоянного тока (ГПТ);
2) электромашинный усилитель (ЭМУ) (РЭМУ 11кВт; PГПТ 100МВт).
Эти преобразователи применяются в старых системах АЭП, либо в мощных уникальных системах АЭП (используют ГПТ, Р 10МВт).
б) магнитовентильные преобразователи
- силовой магнитный усилитель (100Вт 100кВт);
в) ионные преобразователи;
- ртутные вентили, игнитроны (100кВт 10МВт);
г) полупроводниковые преобразователи
1) транзисторные (до 300кВт);
2) тиристорные (до 25МВт).
Полупроводниковые преобразователи преобразуют:
– нерегулируемое постоянное в регулируемое постоянное напряжение (ШИП, 1Вт 300кВт);
– нерегулируемое переменное в регулируемое постоянное напряжение (ведомые сетью управляемые выпрямители, 100Вт 25МВт).
6. Тиристорные управляемые выпрямители как элементы замкнутых систем аэп. (принцип действия, внешние характеристики).
Регулирование выходного напряжения ведомых сетью тиристорных преобразователей осуществляется за счет задержки включения тиристоров относительно точки естественного включения ( – угол управления).
MIN MAX,
где MIN = (1015)0эл, чтобы не перескочить за точку естественной коммутации;
MAX = (150165)0эл, чтобы не было опрокидывания инвертора.
Базовой схемой является мостовая (1кВт1МВт), m2 = 6 (пульсность выходных напряжений гармоник входного тока: 5, 7, 11, 13 и т.д.). Применяется параллельное соединение двух мостов (1МВт6.3МВт), m2 = 12 (пульсность выходных напряжений гармоник входного тока: 1 , 11, 13, 23, 25 и т.д.). Более 6,3МВт применяется схема m2 = 24 (гармоники входного тока: 1 , 23, 25, 47, 49 и т.д.).
Внешняя характеристика неуправляемого выпрямителя представлена на рисунке 3.24, где принято обозначение – ОХИ – ограничительная характеристика инвертора.
Рисунок 3.24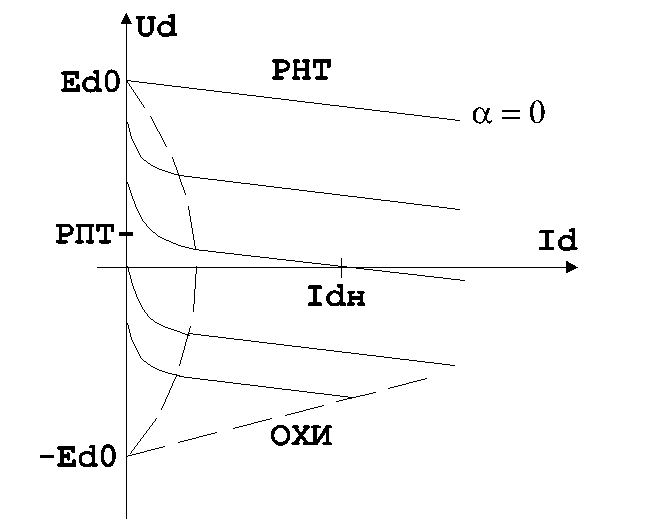
РНТ:
![]() ;
;
ОХИ:
![]() ,
,
где – угол выключения тиристора, при = 10 эл. град. – восстановление запирающих свойств выключенного тиристора.
7. Регулировочные характеристики управляемого выпрямителя с пилообразным опорным напряжением в сифу в режиме непрерывного тока .
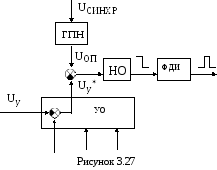
Структурная схема СИФУ с пилообразным опорным напряжением представлена на рисунке 3.27, где приняты обозначения: ГПН – генератор пилообразного напряжения (см. рисунок 3.28); УО – управляющий орган; U0 – напряжение смешения; НО – нуль-орган; ФДИ – формирователь длительности импульса (tУИ – время управляющего импульса; tУИ = (250 350)мкс).
Р
Рисунок 3.28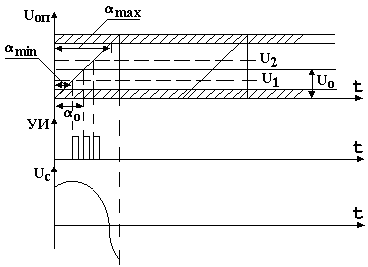
![]() .
.
В соответствии с
уравнением, регулировочная характеристика
СИФУ линейная (см. рисунок 3.29). На рисунке
характеристика 1 – при
= 900,
2 – при
900,
![]() .
.
Пусть
![]() и UУ
= 0, тогда
и UУ
= 0, тогда
![]() .
.
При = 900 , Ed = Ed0 cos = 0; реально чуть больше 900.
![]() .
.
Регулировочная характеристика тиристорного преобразователя в целом Ed=f() нелинейная (косинусоидальная).
Рисунок 3.31

В соответствии с уравнением регулировочная характеристика тиристорного преобразователя будет иметь вид, представленный на рисунке 3.30.
Рисунок 3.29
Рисунок 3.30
Коэффициент передачи тиристорного преобразователя (см. рисунок 3.31):
![]() ;
;
![]() .
.
Пример – UДН = 220В Udo 260В; UОП = 10В
![]()
При расчете систем регулирования ориентируются на максимальное значение . Если тиристорный преобразователь работает, обеспечивая стабилизацию тока, то в расчетах следует подставлять то значение kТП, которое будет иметь тиристорный преобразователь при данном угле управления. В двухзонных электроприводах, при оптимизации контура тока возбуждения ориентируются на максимальный kТП max, который обычно бывает при ослабленном потоке.