

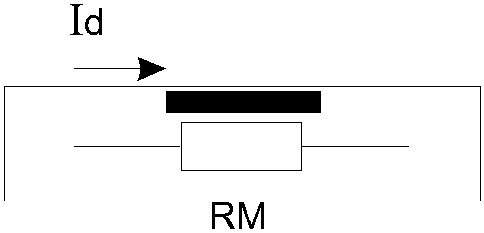
Датчик постоянного тока на базе магнитодиодов
Этот датчик измеряет ток косвенно по величине магнитного поля, которое создает протекающий по шине ток (см. рисунок 3.66).
RRM = f(Ф).
Сам магниторезистор включается в цепь измерительного моста.
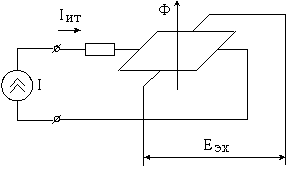
Датчик постоянного тока на основе элементов Холла
Датчик постоянного тока на основе элементов Холла представлен на рисунке 3.67.
ЕэХ = КIистВ 250мВ при В до 0,7Тл.
У датчиков на базе магнитопроводов и элементов Холла отсутствует гальваническая связь с питающей сетью, а передаточная функция может быть представлена безынерционным звеном.
Wдт(p) = Кдт.
Рисунок 3.66
Рисунок 3.67
24. Датчики скорости и эдс. Датчик скорости на базе тахогенератора постоянного тока
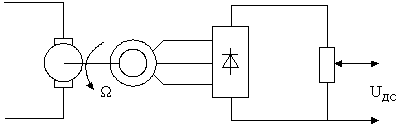
Датчик скорости на базе тахогенератора постоянного тока представлен на рисунке 3.70.
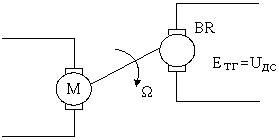 Рисунок 3.70
Рисунок 3.70
Етг = СмФ = Uдс.
Если Ф = const, то Етг .
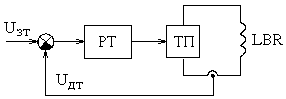
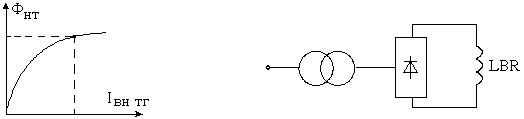
Для стабилизации потока двигателя Фдв осуществляют:
а) магнитную систему ТГ делают насыщенной, т.е. рабочая точка лежит за коленом (см. рисунок 3.71);
б) питание цепи ОВ тахогенератора от источника стабилизированного тока (см. рисунок 3.72).
Рисунок 3.72
в) применение ТГ с возбуждением от постоянных магнитов.
Передаточная функция датчика скорости в этом случае
![]() .
.
Для ЭП с глубоким диапазоном регулирования 1:1000 и более ТГ должен иметь напряжение не менее 20В при 1000 об/мин.
![]() .
.
Датчик скорости на базе тахогенератора переменного тока
Датчик скорости на базе тахогенератора переменного тока представлен на рисунке 3.73.
Рисунок 3.73
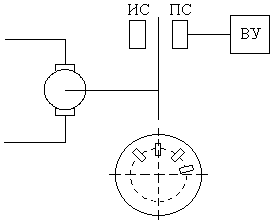
Импульсный датчик скорости (рисунок 3.74)
Рисунок 3.71
На рисунке 3.74 приняты обозначения: ВУ – вычислительное устройство; ИС – источник света (светодиодные излучатели); ПС – приемник света.
Источники света имеют невидимый спектр излучения. Количество отверстий на диске 600, 3000, 6000.
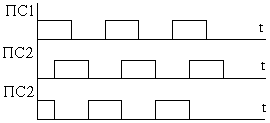
Для получения информации о направлении вращения на диске делают еще ряд перфораций, сдвинутых в пространстве на 90, и по фазе определяют направление вращения. Тогда нужно иметь второй источник и соответственно приемник света (см. рисунок 3.75).
Рисунок 3.74
Рисунок 3.75
Датчики эдс
Датчики ЭДС применяются в системах ЭП для контроля скорости вращения с определенной точностью. Применяются в системах ЭП с диапазоном регулирования Д = 140 только с однозонным регулированием скорости, т.к. при Фдв = const Е .
Датчик эдс на базе тахометрического моста
Датчик ЭДС на базе тахометрического моста представлен на рисунке 3.76а, где приняты обозначения: КО – компенсационная обмотка; ДП – дополнительные полюса.
Если
![]() ,
то Uдэ
е (см. рисунок 3.76б).
,
то Uдэ
е (см. рисунок 3.76б).
а)
б)
Рисунок 3.76
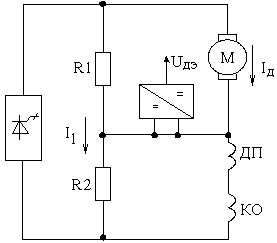

Достоинство: простота схемы.
Недостатки:
- температурная нестабильность датчика, вызванная разной величиной тока, протекающего по силовой схеме и схеме делителя и разными условиями охлаждения (погрешность 710%);
- плохая точность датчика в переходных режимах, где проявляется влияние индуктивности силовой цепи двигателя.
Схема с учетом индуктивности представлена на рисунке 3.77.
Рисунок 3.77
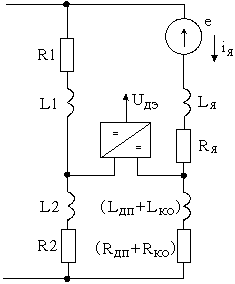
Чтобы Uдэ
е, надо
![]() .
.
Таким образом,
требуется чтобы
![]() .
.
Такое соотношение не всегда выполняется, поэтому включают дополнительные индуктивности L1 и L2, тогда имеем баланс по активному и индуктивному сопротивлению.
![]() .
.
Но это усложняет схему, поэтому выбирают простоту (т.е. без L1 и L2).
Передаточная функция датчика эдс
Wдэ(р) = Кдэ.
Датчики этого типа применяют в роботах и манипуляторах.