

3. Основные положения по дисциплине "Моделирование электропривода"
3.1. Введение
Моделирование- это исследование свойств объекта (машины, механизмы или схемы) на модели, которая в той или иной мере воспроизводит свойства оригинала.
В зависимости от задач моделирования, модель может быть миниатюрной копией оригинала, в состав которой входят все его элементы или объектом имеющим отличную от оригинала физическую природу, но описывается аналогичными уравнениями, или системой дифференциальных уравнений, адекватно описывающих свойства различных систем.
В зависимости от применяемой модели моделирование подразделяют на физическое, математическое и физико-математическое.
Моделирование, как правило, производится на стадиях научных исследований и разработки технического проекта. Моделирование на этой стадии позволяет сделать сравнительный анализ предлагаемых вариантов решения и избежать ошибок при проектировании. Тем самым моделирование позволяет сократить время и затраты на создание того или иного изделия.
3.2. Физическое моделирование
В основу метода физического моделирования положено изучение процессов на модели одной физической природы с оригиналом.
Физическое моделирование можно подразделить на моделирование изделия (машины, механизма, электрической системы) и моделирование внешних воздействий и окружающей среды (нагрузки, внешних усилий и климатических условий). Довольно часто применяют совместное моделирование изделия и окружающей среды, например, исследование модели электродвигателя в климатической камере. В электроприводе физическое моделирование используется для исследования электрических машин, и систем автоматического регулирования отдельных регуляторов, входящих в комплекс системы автоматического регулирования.
Физическое моделирование основано на теории подобия. Подобие означает существование определенных соотношений для параметров сходственных элементов сопоставляемых объектов.
При физическом моделировании электротехнических систем различают полное и неполное подобие. Полное подобие применяют при изучении процессов во времени и пространстве.
Неполное подобие при протекании процесса только во времени или только в пространстве. Моделирование электропривода требует только подобия цепей, т.е. неполного подобия. Определение критериев подобия производится методом приведения уравнений физического процесса к безразмерному виду или методом - критерий подобия. - критериями можно пользоваться, когда известны только параметры участвовавших в процессе элементов, но уравнение процесса неизвестно. При исследовании на модели простейшей электрической цепи с индуктивностью модель должна удовлетворять следующим условиям:
а. для каждой из
магнитосвязанных цепей (обмотки статора,
катушки реле) должны быть одинаковые
постоянные времени
![]() в модели и оригинале, если модели
рассматриваются в одном и том же масштабе
времени;
в модели и оригинале, если модели
рассматриваются в одном и том же масштабе
времени;
б. аналогичному соотношению должны удовлетворять и взаимоиндуктивности.
3.3 Математическое моделирование в электроприводе
Математическое
моделирование автоматической системы
электропривода АСУ ЭП- это процесс
изучения динамических свойств
автоматических систем управления
электроприводами на основе решения
дифференциальных уравнений, адекватно
описывающих свойства реальных систем.
Широко распространенной задачей
моделирования АСУ ЭП является определение
реакции систем управления на типовые
входные воздействия
![]()
![]() и
возмущающие воздействия, как правило,
наброс или сброс момента сопротивления
и
возмущающие воздействия, как правило,
наброс или сброс момента сопротивления![]() .
.
Входные воздействия могут быть:
1. Ступенчатые
![]() .
.
2. Линейно-изменяющиеся
![]() или
или![]() .
.
3. Экспоненциальные
![]() .
.
Математическое моделирование подразделяют на метод решения обобщенного дифференциального уравнения системы и структурный метод моделирования. В настоящее время большее распространение получил структурный метод, так как он позволяет в процессе исследования переходных процессов вносить коррективы в отдельные звенья системы.
При моделировании широко используются как аналоговые, так и цифровые вычислительные машины ( АВМ и ЦВМ ). Процесс моделирования на электронных вычислительных машинах ЭВМ (АВМ и ЦВМ) состоит из следующих общих этапов:
1. Составление структурной схемы исследуемой системы;
2. Определение параметров цепи и передаточных функций регуляторов и механической системы;
3. Разработка алгоритма и программы решения поставленной задачи;
4. Ввод программы в ЭВМ;
5. Эксплуатация программы.
При этом, необходимо отметить, что 1 и 2 этапы для обоих видов ЭВМ являются идентичными, а последующие отличаются, в зависимости от вида применяемой ЭВМ, как по описанию так и по методам.
3.3.1. Составление структурных схем.
Структурные схемы состоят из набора типовых звеньев. Основными типовыми звеньями являются: пропорциональное, апериодическое, интегральное, дифференциальное, пропорционально- интегральное и некоторые другие, в том числе нелинейные.
В таблице 3.1. приведены дифференциальные уравнения основных звеньев и их передаточные функции.
Таблица 3.1.
|
№ п/п |
Наименование звена |
Диффер. или алгеб. уравнение |
Передаточная функция |
|
1. |
Пропорциональное (безинерционное) звено |
|
|
|
2. |
Апериодическое звено |
|
|
|
3. |
Интегральное |
|
где
|
|
4. |
Дифференциальное звено |
|
где
|
|
5, |
Пропорционально- интегральное звено |
|
где
|
Структурная схема
электропривода, состоит из звеньев,
характеризующих динамические свойства
электродвигателя и преобразователя с
системой регулирования и обратными
связями. Например, в структурную схему
двигателя постоянного тока при однозонном
регулировании входят звенья электромагнитной
цепи якоря (апериодическое), инерционность
механических масс ( интегральное) и
передаточные функции
![]() ;
и
;
и![]() ( пропорциональные звенья), отражающие
взаимодействие тока и потока и внутреннюю
обратную связь по ЭДС.
( пропорциональные звенья), отражающие
взаимодействие тока и потока и внутреннюю
обратную связь по ЭДС.
Передаточные функции регулятора скорости при системе подчиненного регулирования определяются в зависимости от настроек, применяемых в контуре регулирования ( модульный или симметричный оптимум). При настройке на модульный оптимум применяют пропорциональный регулятор, а при настройке на симметричный оптимум применяют ПИ- регулятор (пропорционально- интегральное звено). В качестве регулятора тока, как правило, в обоих случаях применяют ПИ- регулятор.
3.3.2. Определение параметров цепей электропривода постоянного тока.
Для расчета регуляторов тока и скорости, а также для расчета переходных процессов необходимо знать численные значения параметров объектов регулирования. Основные данные двигателя, преобразователя и других аппаратов берутся из каталогов и справочников. Расчет других параметров производится по следующим формулам:
Сопротивление цепи якоря.
![]() ,
,
где
![]()
![]() -
сопротивление двигателя, приведенное
к допустимой температуре нагрева.
-
сопротивление двигателя, приведенное
к допустимой температуре нагрева.
![]() ,
,
где
![]()
![]() -
сопротивление в горячем и холодном
состоянии,
-
сопротивление в горячем и холодном
состоянии,
![]() -
температурный коэффициент ( для меди
-
температурный коэффициент ( для меди
![]() =0,004),
=0,004),
![]() -
допустимая температура нагрева и
температура, при которой дано значение
сопротивления.
-
допустимая температура нагрева и
температура, при которой дано значение
сопротивления.
![]() -
сопротивление трансформатора (реактора)
и динамическое сопротивление тиристора,
-
сопротивление трансформатора (реактора)
и динамическое сопротивление тиристора,
![]() - эквивалентное
сопротивление, обусловленное падением
напряжения при коммутации тиристоров,
- эквивалентное
сопротивление, обусловленное падением
напряжения при коммутации тиристоров,
![]() -
индуктивное сопротивление фазы
трансформатора (реактора),
-
индуктивное сопротивление фазы
трансформатора (реактора),
![]() -
число пульсаций.
-
число пульсаций.
Машинный коэффициент
![]() или
или![]() ,
,
где![]() .
.
Индуктивность якоря двигателя.
![]() ,
,
где
![]() -
число пар полюсов,
-
число пар полюсов,
![]() =0,6-
для некомпенсированных двигателей,
=0,6-
для некомпенсированных двигателей,
![]() =
0,25 - для компенсированных.
=
0,25 - для компенсированных.
Индуктивность цепи якоря.
![]()
где
![]() - индуктивность фазы трансформатора
(реактора) и сглаживающего дросселя.
- индуктивность фазы трансформатора
(реактора) и сглаживающего дросселя.
Постоянная времени цепи якоря
![]() .
.
Постоянная времени
преобразователя принимается
![]() =0,005...0,01.
=0,005...0,01.
Коэффициент усиления преобразователя определяется при линейной зависимости угла управления от управляющего напряжения по формуле
![]() ,
,
а для СИФУ с арксинусной характеристикой
![]() ,
,
где
![]() - коэффициент периодичности (для
трехфазной мостовой схемы
- коэффициент периодичности (для
трехфазной мостовой схемы![]() =0,955),
=0,955),
![]() -
пульсность схемы выпрямления,
-
пульсность схемы выпрямления,
![]() -
амплитуда питающего напряжения,
-
амплитуда питающего напряжения,
![]() -
половина полного изменения пилообразного
напряжения при линейной зависимости и
амплитуда синусоидального опорного
напряжения для СИФУ с арксинусной
характеристикой.
-
половина полного изменения пилообразного
напряжения при линейной зависимости и
амплитуда синусоидального опорного
напряжения для СИФУ с арксинусной
характеристикой.
Для преобразователей
запорожского завода
![]() определяется по формуле
определяется по формуле
![]() ,
,
где
![]() -
коэффициент схемы.
-
коэффициент схемы.
Для трехфазной
мостовой схемы
![]() =2.34,
для трехфазной нулевой схемы
=2.34,
для трехфазной нулевой схемы![]() =
1.17;
=
1.17;
![]() -
фазовое напряжение питающей сети;
-
фазовое напряжение питающей сети;
![]() -опорное
пилообразное напряжение.
-опорное
пилообразное напряжение.
Постоянная времени обмотки возбуждения
 ,
,
где
![]() =1.06-1.12-
коэффициент рассеивания,
=1.06-1.12-
коэффициент рассеивания,
![]() и
и
![]() - разница значения потока и намагничивающей
силы в начале и в конце выбранного
участка кривой намагничивания.
- разница значения потока и намагничивающей
силы в начале и в конце выбранного
участка кривой намагничивания.
Постоянная времени
вихревых токов (![]() )
принимается равной
)
принимается равной
![]() =(0.10...0.13)
=(0.10...0.13)![]() .
.
3.3.3 Передаточные функции регуляторов тока и скорости.
При подчинённой системе регулирования и настройке электропривода на модульный и симметричный оптимум передаточная функция регулятора тока имеет вид:
![]() ,
,
где
![]() ,
,
где
![]() - некомпенсированная постоянная
времени,
- некомпенсированная постоянная
времени,
![]() -
коэффициент обратной связи по току.
-
коэффициент обратной связи по току.
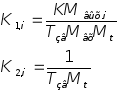
Передаточная
функция регулятора скорости при настройке
на модульный оптимум определяется из
выражения ![]() ;
;
где
![]() -
приведенный момент инерции, кгм2
,
-
приведенный момент инерции, кгм2
,
![]() -
некомпенсированная постоянная времени,
-
некомпенсированная постоянная времени,
![]() -
обратная связь по скорости В/с;
-
обратная связь по скорости В/с;
![]() -
электромеханическая постоянная
времени.
-
электромеханическая постоянная
времени.
При настройке на симметричный оптимум передаточная функция регулятора скорости будет иметь вид:
 ,
,
где
![]() .
.
3.3.4. Моделирование электропривода на АВМ.
Аналоговые вычислительные машины (АВМ) предназначены для исследования динамики систем и объектов автоматического регулирования, движение которых описывается дифференциальными уравнениями.
Математические операции в АВМ выполняются операционными блоками. В их состав входят блок суммирования (сумматор), блоки интегрирования и дифференцирования (И-Д), производящие операции интегрирования и дифференцирования входной переменной по времени, блок умножения и деления (У-Д) и блок нелинейных функций НФ, осуществляющий нелинейные зависимости.
Базовым элементом всех АВМ является усилитель постоянного тока. Кроме того к основным элементам можно отнести активные сопротивления и емкости, диоды и операционные реле. Основными типами АВМ являются МН7, МН7М, МН-10, МН-10М, АВК-32 и другие.
Порядок исследования переходных процессов на АВМ при структурном методе моделирования.
1. По структурной схеме составляют схему модели.
2. Задаются масштабами всех параметров.
3. Определяются передаточные коэффициенты звеньев модели.
4. Собирается схема модели.
5. Устанавливаются нули на выходе каждого усилителя, включенного в схему при нулевом входе.
6. Устанавливаются коэффициенты передачи на пропорциональных и интегральных усилителях.
7. Производится расчет переходного процесса.
8. Анализируются результаты и составляется отчет.
Схема модели составляется из отдельных звеньев. Как уже указывалось, наиболее распространенными звеньями являются пропорциональные, интегральные и дифференциальные. Принципиальные схемы и схемы моделей основных звеньев и их передаточные функции представлены на рис. 3.1. (а...е).
Как видно из рисунков пропорциональное, интегральное и апериодическое звенья в схемах модели выполняются с использованием одного операционного усилителя (а,б,в).
Для реализации "чистого" дифференциального и пропорционально- интегрального звеньев часто используют схемы из трех усилителей 2,1 (г,д). [1]. Звено ограничения выходного напряжения показано на рис. 2.1.(e).
Ограничение выходного напряжения можно также получить включением стабилитрона в обратную связь усилителя.
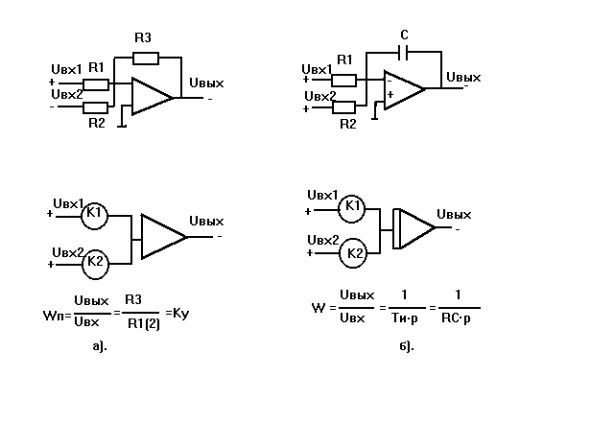
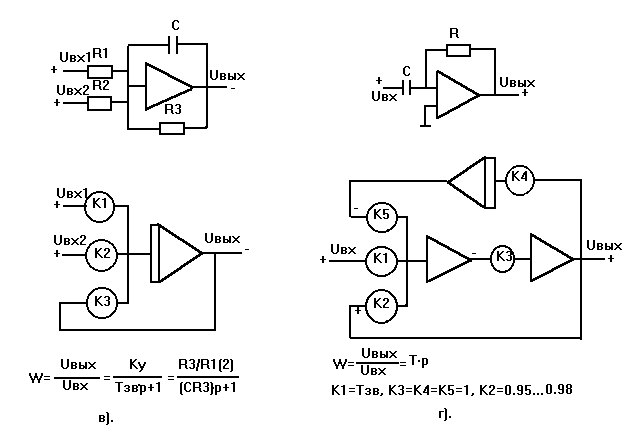
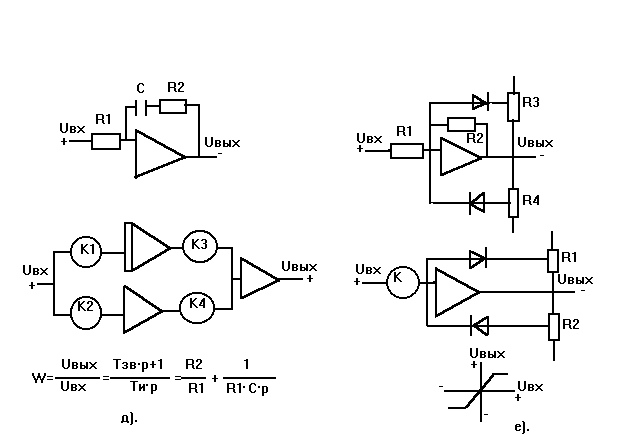
Рис. 3.1. Схемы звеньев, операционных усилителей и модели:
а) пропорционального, б) интегрального, в) апериодического, г) дифференциального, д) пропорционально-интегрального, е) пропорционального с ограничением.
3.3.4.1. Выбор масштабов переменных и времени.
Исходным выражением
для выбора масштаба переменной
![]() следует считать отношение
следует считать отношение
![]() ,
,
где
![]() - максимальное рабочее напряжение АВМ;
- максимальное рабочее напряжение АВМ;
![]() -
максимально возможное значение реальной
переменной в моделируемой системе.
-
максимально возможное значение реальной
переменной в моделируемой системе.
На практике выбор масштабов производится на основе просмотра нескольких вариантов.
Причем этот выбор осуществляется при следующих ограничениях:
а) Коэффициенты
модели, которые зависят от масштабов,
должны удовлетворять неравенству![]()
![]() ,
,
где
![]() -
минимально и максимально допустимые
значения коэффициента передачи
операционных усилителей для конкретной
АВМ. ( для АВМ типа МН-7М
-
минимально и максимально допустимые
значения коэффициента передачи
операционных усилителей для конкретной
АВМ. ( для АВМ типа МН-7М![]() =0,06,
=0,06,![]() =10);
=10);
б) напряжение на
усилителях модели должны изменяться в
пределах![]() ,
,
где
![]() -
минимально допустимое и максимальное
напряжение конкретной АВМ. (для АВМ
МН-7М
-
минимально допустимое и максимальное
напряжение конкретной АВМ. (для АВМ
МН-7М![]() =6В,
=6В,![]() =100В.
=100В.
При выборе масштабов
времени
![]() .
Следует учитывать следующие ограничения:
.
Следует учитывать следующие ограничения:
а) частота переходных
процессов на модели не должна превышать
допустимого для данной АВМ ( для МН-7Мt)
![]() =5гц,
=5гц,
б) максимальное
время решения задачи не должно превышать
допустимого для использования АВМ (для
МН-7М
![]() =200с).
=200с).
В общем случае
коэффициенты передачи ( настройки)
усилителей с учетом масштабных множителей
переменных и времени записываются
следующей формулой: ![]() ,
,
где
![]() -
машинный коэффициент передачи усилителя
по i-му входу;
-
машинный коэффициент передачи усилителя
по i-му входу;
![]() -
коэффициент усиления в реальной схеме;
-
коэффициент усиления в реальной схеме;
![]() -
постоянная времени реального звена;
-
постоянная времени реального звена;
![]() -
масштаб выходной и входной переменной;
-
масштаб выходной и входной переменной;
![]() -
масштаб времени.
-
масштаб времени.
Определение коэффициентов для основных типовых звеньев приведены в таблице 3.2.
Таблица 3.2.
|
№ п/п |
Наименование звена |
Передаточная функция |
Коэффициент настройки |
|
1. |
Апериодическое звено |
|
|
|
2. |
Пропорциональное звено |
|
|
|
3. |
Интегральное звено |
|
|
Работа на АВМ производится в следующей последовательности:
а. набирают схему модели на панели;
б. устанавливают на выходах усилителей нули, а затем коэффициенты настройки;
в. устанавливают коэффициенты настройки;
г. переключают АВМ в режим работы и производят исследование переходных процессов.
3.3.5. Моделирование на цифровой ЭВМ.
Цифровая вычислительная машина (ЦВМ) используется для управления и решения многих задач, в том числе для моделирования переходных процессов. Характер переходных процессов можно определить методом имитационного моделирования, определяя кривую переходного процесса и частотным методом, который сводится к нахождению амплитудно- фазовых характеристик передаточной функции, а следовательно и характера переходного процесса. Чаще применяют имитационное моделирование.
Наиболее распространенными методами моделирования систем управления на ЦВМ являются численные методы; среди них метод Эйлера ( метод ломаных), усовершенствованный метод Эйлера - Коши и метод Тастина.
Наиболее простым методом является метод Эйлера, правда и наименее точным. При изучении данного курса разберем два метода: метод Эйлера и метод Тастина.
Порядок моделирования переходных процессов на ЦВМ.
1. После составления структурной схемы и расчета параметров отдельных звеньев электропривода ( параметров электрической цепи, регуляторов и т.д.) разрабатывается алгоритм (блок-схема) расчета переходного процесса.
2. Составляется таблица машинных обозначений коэффициентов усиления, постоянных времени, параметров электрической цепи и т.д.
3. Составляется программа расчета переходных процессов.
4. Программа заносится в ЦВМ.
5. Производится расчет переходного процесса и анализ полученных результатов.
3.3.5.1. Расчетные формулы для определения выходных переменных звеньев методом Эйлера.
При моделировании по структурной схеме решение производится по отдельным звеньям. Формулы решения основных типов звеньев методом Эйлера приведены в табл. 3.3.
Таблица 3.3.
|
№ п/п |
Наименование звена |
Передаточная функция |
Дифференциаль-ное уравнение |
Расчётные формулы |
|
1. |
Пропорциональ-ное звено |
|
|
|
|
2. |
Интегральное звено |
|
|
|
|
3. |
Апериодическое звено |
|
|
|
|
4. |
Пропорционально-интегральное звено(ПИ-регуля- тор) |
|
|
|

* Примечание.
![]() -
выходная и входная величины передаточной
функции;
-
выходная и входная величины передаточной
функции;![]() -
постоянная времени звена;
-
постоянная времени звена;![]() -
коэффициент усиления передаточной
функции.
-
коэффициент усиления передаточной
функции.
3.3.5.2. Определение выходных величин методом Тастина.
Метод Тастина
основан на
![]() преобразований, когда функцию в
операторном виде заменяют функцией
преобразований, когда функцию в
операторном виде заменяют функцией![]() -преобразований. Функция
-преобразований. Функция![]() трактуется как изображение непрерывной
функции времени
трактуется как изображение непрерывной
функции времени![]() рассматриваемой в дискретные моменты
времени.
рассматриваемой в дискретные моменты
времени.
Замена функции в
операторном виде
![]() - преобразованием практически
осуществляется заменой оператора "p"
на выражение
- преобразованием практически
осуществляется заменой оператора "p"
на выражение![]() .
В этом случае при численном методе
вычисления уравнение интегрального и
апериодического звеньев будут иметь
вид:
.
В этом случае при численном методе
вычисления уравнение интегрального и
апериодического звеньев будут иметь
вид:
а). интегральное звено
![]() замена
замена
![]() ; тогда
; тогда
![]() .
.
Принимая, например,
при
![]() и
и![]() как текущее значение
как текущее значение![]() и предшествующее получим:
и предшествующее получим:![]() .
.
б). апериодичесое звено.
Передаточная
функция в операторной форме имеет вид
![]()
![]() .
.
При
![]() -
преобразовании оно выразится формулой:
-
преобразовании оно выразится формулой:
 ,
решая это уравнение и подставляя вместо
,
решая это уравнение и подставляя вместо
![]() и 1 значения
и 1 значения![]() и
и![]() , получим:
, получим:
![]() .
.
Определение выходной величины при пропорциональном звене производится так же как и при расчете по методу Эйлера.
3.3.5.3. Составление алгоритма.
Алгоритм определяет последовательность расчета переходных процессов и формулы расчета с логическими заключениями.
Примерный план алгоритма.
1. Наименование программы.
2. Ввод данных
параметров ( двигателя, преобразователя,
регуляторов САР и т.д.). Кроме того
вводятся значения напряжения задатчика
скорости, шаг интегрирования
![]() ,
время процесса
,
время процесса![]() ,
шаг печати
,
шаг печати![]() и т.д., где
и т.д., где![]() =>7,
=>7,![]() =(1,2...1,4)
=(1,2...1,4)![]() разгона (торможения) двигателя.
разгона (торможения) двигателя.
3. Начальные условия. Начальные условия выходных величин звеньев можно вводить только те, которые в начале процесса t=0 имеют не нулевое значение.
4. Начало цикла.
Для
![]()
![]() до
до![]() ,
шаг
,
шаг![]() .
.
5. Расчетные формулы, логические умозаключения.
6. Счет циклов
![]() .
.
7. Логическое
решение. Если![]() ,
перейти к концу цикла (10).
,
перейти к концу цикла (10).
8. Печать ( обычно
![]() ).
).
9. Обнуление циклов
расчета.
![]() .
.
10. Конец цикла.
11. Конец.
После разработки алгоритма составляется таблица со значениями параметров и их машинными обозначениями.
Форма таблицы.
Таблица 3.4.
|
№ п/п |
Наименование параметров |
ед. изм. |
Обознач.в структурной схеме |
Машинное обозначе- ние |
Значение параметра |
Примечание |
|
1. |
Напряжение задатчика скорости |
В |
|
|
|
|
|
2. |
Постоянная времени задатчика интенсивности |
с |
|
|
|
|
|
3. |
Сопротивление цепи якоря |
Ом |
|
|
|
|
3.3.5.4. Составление программы.
По алгоритму с учетом машинных обозначений составляют программу. Фрагменты программы приведены на языке Бейсик. Ввод значений параметров в ПЭВМ можно производить двумя методами. Для неизменяемых параметров ввод осуществляется следующим образом.
PR1NT "Параметры.
Наименование звена
![]() ,
,![]() ,
,![]() "
"
REАD
![]() ,
,![]() ,
,![]()
DАТА 5, 0.08, 0.4
При частом изменении значений регулируемых параметров ввод их в ПЭВМ производят в диалоговом режиме.
PR1NT " Введите
значение момента сопротивления и шаг
печати
![]() ,
,![]() "
"
INPUT
![]() ,
,![]()
Начало цикла записывается выражением:
FOR
![]() TO
TO![]() STEP
STEP![]() ,
,
где
![]() -
текущее значение времени, шаг расчета
и время процесса соответственно.
Ограничение значения какого-либо
параметра записывается логическим
выражением. Например, ограничение
напряжения выхода задатчика интенсивности
запишется в виде:
-
текущее значение времени, шаг расчета
и время процесса соответственно.
Ограничение значения какого-либо
параметра записывается логическим
выражением. Например, ограничение
напряжения выхода задатчика интенсивности
запишется в виде:
IF
![]()
![]() THEN
THEN![]()
![]() .
.
Безусловный переход записывается логическим выражением, например,
IF
![]() GOTO 10.
GOTO 10.
где 10- метка, показывает на какую позицию сделать переход.
Конец цикла записывается в виде
NEXT
![]() -конец цикла.
-конец цикла.
END - конец программы.
При пуске двигателя
приводимого в движение механизм с
реактивным моментом сопротивления в
начальный момент
![]() и тогда в расчёте появляется отрицательное
значение скорости, чего не может быть
физически.
и тогда в расчёте появляется отрицательное
значение скорости, чего не может быть
физически.
В этом случае можно употреблять логическое выражение
IF
![]() THEN
THEN![]() .
.
3.4. Физико-математическое моделирование.
Физико-математическое моделирование используется для исследования переходных процессов при разработке отдельных регуляторов, входящих в комплекс системы автоматического регулирования, или электропривода с многомассовой механической системой. При этом сам регулятор или электропривод может быть представлен в оригинале или в виде физической модели, а остальные части системы моделируются с помощью физических и математических моделей, или только с помощью математической модели. Математическое моделирование производится на АВМ или на управляющей ЦВМ. При этом масштаб времени принимается равным единице ( процессы моделируются в реальном времени).