

2.2. Электропривод ротора.
ЭП ротора может быть групповым и индивидуальным.
Групповой привод служит одновременно и для лебедки, и для обеспечения вращения ротора.
Требования к ЭП ротора буровой установки:
Должен иметь мягкую механическую характеристику.
Должен иметь минимальный момент инерции вращающихся частей.
Должен иметь небольшую кратность максимального момента.
Должен иметь реверс.
Повышению эффективности привода ротора способствует применение электромагнитных муфт различных конструкций, устанавливаемых между двигателем и ротором и служащим для передачи вращения от ведущего вала к ведомому. Пуск и регулирование частоты вращения ротора связаны с потерями энергии в электромагнитной муфте, приводящими к её нагреву.
Электромагнитные муфты позволяют решить следующие задачи:
регулирование частоты вращения ротора в относительно небольшом диапазоне, определяемом допустимыми потерями в муфте. Для расширения диапазона регулирования частоты вращения могут использоваться муфты с водяным охлаждением;
ограничение передаваемого момента и защиту бурильных труб от поломки;
плавное закручивание и раскручивание бурильных труб;
дают возможность кратковременного получения высокого значения момента на низкой скорости при ликвидации аварий;
снижение частоты включения и отключения электропривода.
Существуют следующие виды электромагнитных муфт: электромагнитные муфты скольжения, индукционные электромагнитные муфты и электропорошковые муфты.
Режим работы приводного двигателя ротора продолжительный, а мощность, которую он должен развивать в процессе бурения, складывается из мощности потерь в механизмах привода, установленных на поверхности, из мощности, необходимой для холостого вращения колонны бурильных труб в скважине, а также мощности на долоте.
Для расчета отдельных составляющих мощностей существует эмпирические формулы. При этом мощность холостого хода вращения колонны бурильных труб зависит от частоты вращения, длины и диаметра бурильных труб, качества промывочной жидкости, диаметра и кривизны скважины. Среднее значение мощности на долоте зависит от осевой нагрузки на долото, угловой скорости инструмента, количества и качества промывочной жидкости, типа, размера и состояния долота, а также свойств разбуриваемых пород.
Мощность на долоте можно также определить по удельному расходу мощности на единицу площади забоя, которая для роторного бурения принимается равной 35-150 Вт/см2.
Мощность потерь в механизмах привода зависит от типа, состояния оборудования и частоты вращения.
Передача энергии долоту с поверхности через колонну бурильных труб вызывает значительные потери мощности и снижает КПД всего процесса бурения, особенно при больших глубинах.
В процессе бурения неоднородных пород момент сопротивления непрерывно изменяется. Колебания момента сопротивления на долоте передаются с высокой скоростью по колонне стальных бурильных труб приводному двигателю ротора в виде упругих волн кручения, продольных колебаний и других возмущений.
В результате отражения волн кручения, вызванных заклиниванием долота, напряжения кручения могут вызвать поломку труб. Напряжения кручения в трубах при мягкой механической характеристике привода будут меньше, чем при жесткой.
При
заклинивании долота, когда низ колонны
бурильных труб неподвижен, а ротор
продолжает вращаться, закручивая трубы,
момент двигателя может достигать
максимального значения. Чтобы ограничить
при этом напряжение кручения в трубах,
следует ограничить момент от двигателя
к ротору. Этого можно достигнуть, применяя
двигатель с кратностью максимального
момента
![]() .
.
С заклиниванием долота связан и процесс передачи колонне бурильных труб кинетической энергии, запасенной во вращающихся частях поверхностного оборудования привода ротора. Для уменьшения кинетической энергии, передаваемой трубам, целесообразно иметь привод ротора с минимальным моментом инерции вращающихся частей.
Оптимальные значения частоты вращения ротора целесообразно определять экономическим расчетом исходя из минимальной стоимости 1 м проходки скважины.
Как показал опыт эксплуатации буровых установок, бесступенчатое регулирование частоты вращения ротора при бурении глубоких скважин в диапазоне 5:1-7:1 может обеспечить увеличение механической скорости бурения до 30 % и рейсовой скорости до 20 %. Регулировать частоту вращения целесообразно при постоянном моменте. Привод должен иметь оперативный реверс, так как с помощью ротора выполняются аварийные и некоторые вспомогательные работы.
В буровых установках, рассчитанных на небольшие глубины бурения и ранних лет выпуска, применяется групповой ЭП лебедки и ротора. При этом приводные двигатели при роторном бурении оказываются недогруженными, так как приводная мощность лебедки больше приводной мощности ротора.
Во вновь разрабатываемых буровых установках обычно предусматривают индивидуальный ЭП ротора. В буровой установке Уралмаш -5000Э используется регулируемый индивидуальный привод ротора по системе «генератор-двигатель» (Г-Д). Трехмашинный преобразовательный агрегат состоит из генератора (400 кВт, 460 В), вращаемого синхронным двигателем (500 кВт, 6 кВ, 1000 об/мин) и двигателя постоянного тока привода ротора (250 кВт, 350 В). Обмотка возбуждения генератора питается от реверсивного однофазного тиристорного преобразователя, управляемого магнитным усилителем.
Система Г-Д позволяет регулировать скорость вращения ЭД, как вверх от номинальной (изменяя магнитный поток обмотки возбуждения двигателя), так и вниз от номинальной (изменяя магнитный поток обмотки возбуждения генератора).
В схеме управления предусмотрены защиты и блокировки от превышения тока в якорной цепи генератора и двигателя, исчезновения поля двигателя, отключения асинхронных электродвигателей вентиляторов охлаждения. Двигатель вращает ротор через двухскоростную механическую передачу, что обеспечивает работу и в рабочем и аварийном режимах при требуемых скоростях и моментах. Путем применения различных обратных связей в системе автоматического управления формируются требуемые статические и динамические характеристики привода.
В последнее время для питания двигателя ротора используют силовые тиристорные преобразователи (система ТП-Д), положенные в основу регулируемого привода постоянного тока.
Система управления электроприводом построена по принципу подчиненного управления и включает в себя контур регулирования ЭДС двигателя и подчиненный ему контур регулирования тока. Регулятор ЭДС – пропорциональный (П-регулятор), регулятор тока – пропорционально-интегральный (ПИ-регулятор).
Управление электроприводом осуществляется сельсинным командоаппаратом. Механическая характеристика такого привода мягкая и представлена на рис. 2 (АВ – рабочий участок).
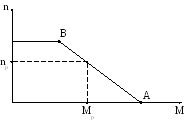
Рис. 2.