

3. Электрооборудование установок для насосной добычи нефти.
3.1. Электрооборудование станков-качалок.
Область экономически целесообразного применения штанговых плунжерных насосов (станков-качалок) или бесштанговых погружных центробежных электронасосов (ЭЦН) определяется суточной производительностью скважины и глубиной подвески насоса. Для станков-качалок эта область характеризуется суточной производительностью от 5 до 50 м3/сут. при глубине подвески до 1600 м или производительностью 300 м3/сут. при глубине подвески до 400 м. Глубинный насос 1 станка-качалки подвешивается на колонне насосных труб 3(рис. 22). Плунжеру 2 насоса сообщается возвратно-поступательное движение с передачей энергии от балансира станка-качалки при помощи колонны штанг 4. Станок-качалка имеет асинхронный электродвигатель (ЭД) с КЗ ротором, с повышенным пусковым моментом, обеспеченным за счет специальной конструкции обмотки ротора: двойной беличьей клетки или глубокопазной обмотки. Кроме ЭД станок-качалка имеет редуктор 10. Колонна штанг станка-качалки на устье скважины через шток соединена с головкой балансира 6 станка-качалки. Балансир с помощью шатунов связан с кривошипами, вал которых через редуктор и клиноременную передачу связан с ЭД. Изменяя расстояние от кривошипа до места присоединения шатунов к кривошипу можно регулировать ход полированного штока и длину хода плунжера насоса. Балансирный и кривошипный противовесы служат для уравновешивания нагрузки подвижной системы станка-качалки и двигателя при ходе колонны штанг вниз и вверх (рис. 22).
Частоту качаний балансира можно изменять путем установки шкивов различных диаметров у клиноременной передачи. Мощность ЭД для привода станков-качалок находится в диапазоне 1,7-55 кВт.
Режим работы ЭД станка-качалки характеризуется резко пульсирующей нагрузкой и непрерывными переходными процессами. Характер изменения нагрузки (момента сопротивления и мощности нагрузки) на валу ЭД определяется законом изменения скорости и усилия в точке подвеса штанг к балансиру. Точка подвеса штанг совершает колебательные движения, перемещаясь по вертикали при
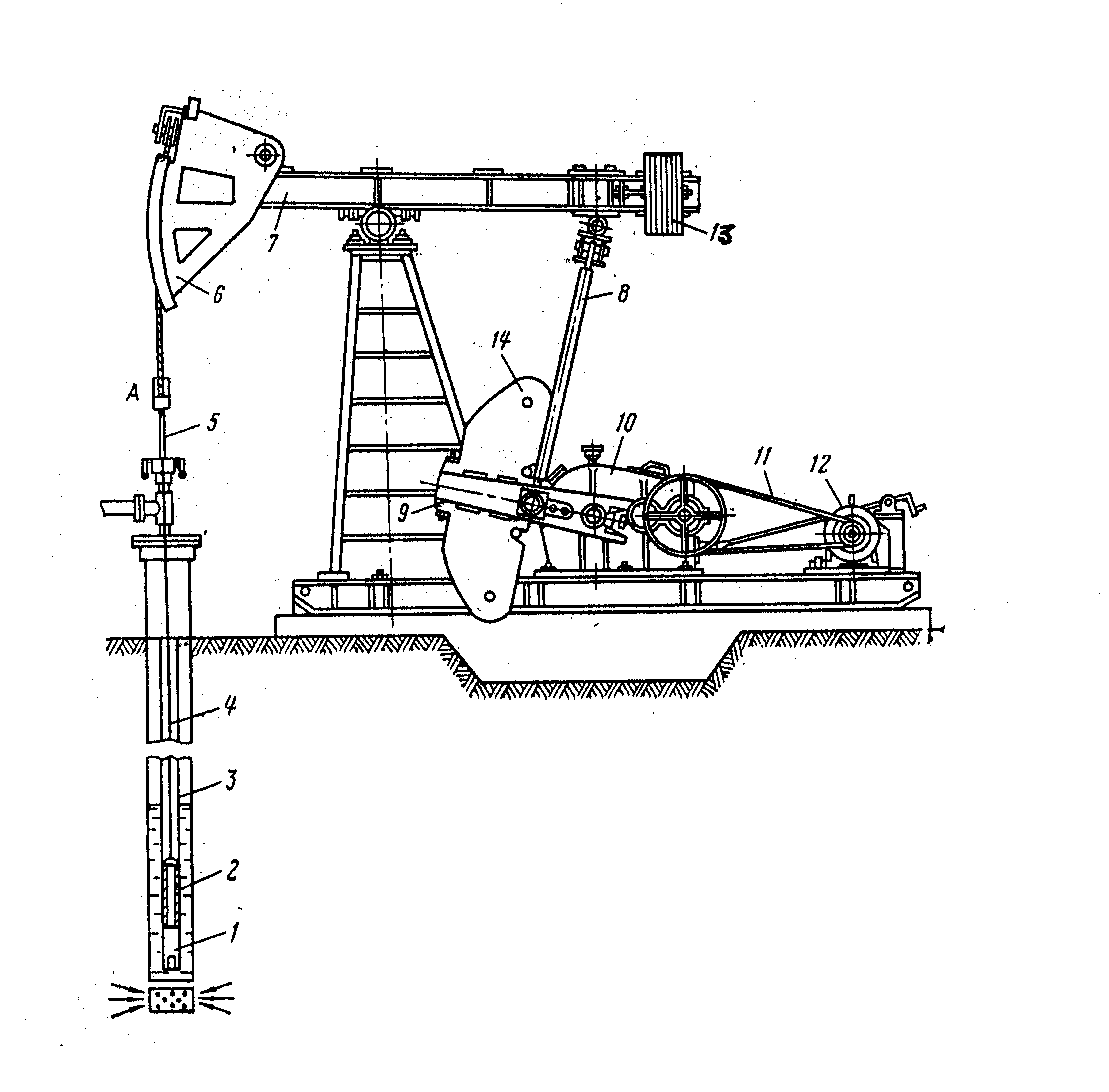
Рис. 22 Конструктивная схема станка-качалки:
1 – плунжерный глубинный насос; 2 – плунжер; 3 – колонна насосных труб; 4 – колонна штанг; 5 – шток устьевой; 6 – головка балансира; 7 – балансир; 8 – шатун; 9 – кривошип; 10 – редуктор; 11 – клиноременная передача; 12 – электродвигатель; 13 – противовес балансирный; 14 – противовес кривошипный.
неизменной скорости вращения ЭД, поэтому скорость перемещения точки подвеса изменяется по закону близкому к синусоидальному – одна полуволна синусоиды соответствует движению головки балансира вверх, вторая полуволна – движению вниз. За один цикл работы насоса или одно качание график имеет два максимума и два минимума. Максимальное значение скорости соответствует средним, а минимальные – крайним положениям балансира. При ходе плунжера вверх к точке подвеса штанг приложена статическая нагрузка, создаваемая весом столба жидкости над плунжером, весом самих штанг и силами трения. Эта нагрузка не прикладывается внезапно, а постепенно возрастает в начальный период хода вверх, благодаря демпфирующему действию упругих деформаций штанг и труб. При ходе плунжера вниз статическая нагрузка в точке подвеса действует в направлении движения и разгружает двигатель, она определяется весом штанг за вычетом веса занимаемого ими объема жидкости и сил трения. При изменении направления движения плунжера усилие в точке подвеса не принимает мгновенно своего установившегося значения и постепенно убывает из-за упругих деформаций штанг и труб. Результирующий момент сопротивления, приведенный к валу двигателя, зависит от положения кривошипа. Мощность нагрузки на валу двигателя изменяется во времени, так же как и момент сопротивления. Амплитудное значение момента сопротивления и мощности нагрузки на валу ЭД резко отличается друг от друга при ходе плунжера вверх и вниз (рис. 23). Такой режим работы невыгоден для ЭД станка-качалки и для питающей его сети. Для ЭД он не выгоден потому, что при преодолении пиков нагрузки при движении плунжера вверх двигатель перегружается, а при снижении его мощности во время движения плунжера вниз двигатель оказывается недогруженным и работает с пониженным значением КПД и коэффициента мощности. Для того, чтобы при преодолении пиков нагрузки двигатель не перегревался выше допустимой температуры приходится завышать мощность ЭД, тогда при движении плунжера вниз недогрузка ЭД становится еще больше. Для питающей сети такой режим не выгоден, потому что пики нагрузки приводят к колебаниям тока в сети и колебаниям напряжения. Таким образом целесообразно выравнивать нагрузку ЭД при ходе плунжера как вверх, так и вниз.
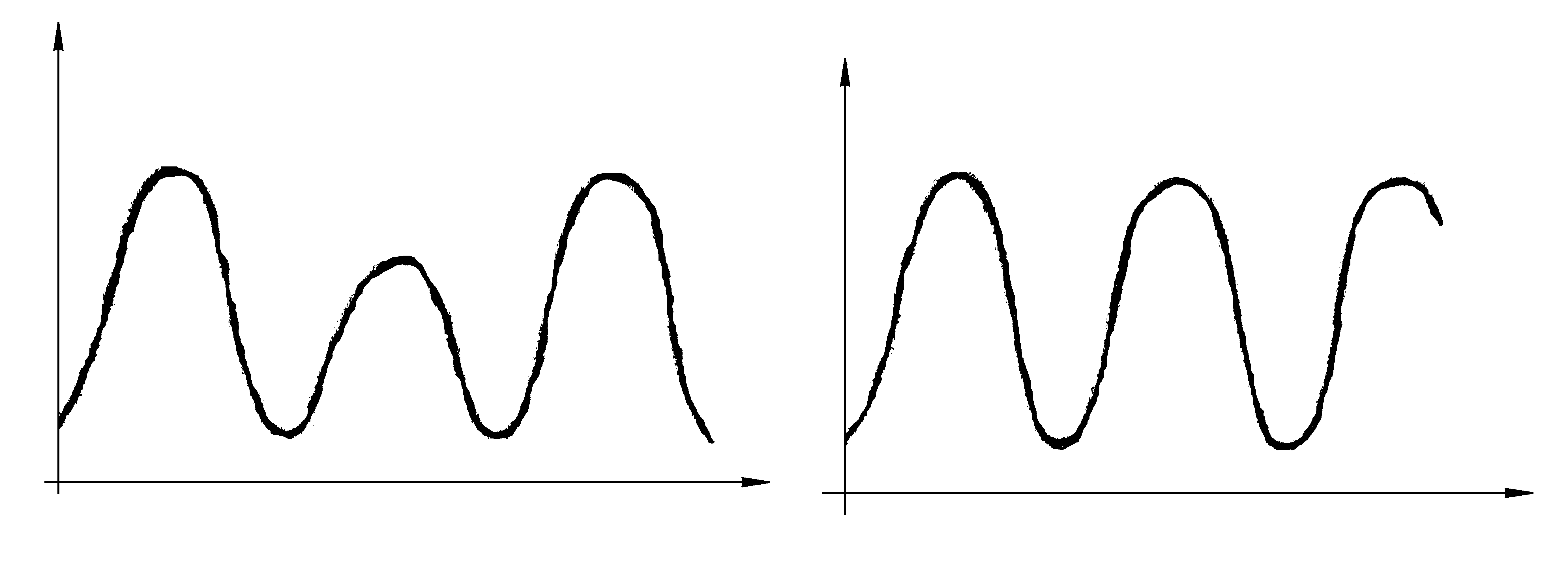
Рис. 23. Графики изменения мощности нагрузки на валу двигателя:
а) неуравновешенный станок-качалка;
б) уравновешенный станок-качалка.
Уравновешивание ЭД осуществляется специальными противовесами, которые устанавливают либо на плече балансира, противоположном точке подвеса штанг, либо на кривошипах. Соответственно в первом случае уравновешивание называют балансирным, а во втором случае – кривошипным. Часто применяют комбинированное уравновешивание. Противовесы создают дополнительные моменты относительно оси вращения кривошипа. Эти моменты являются движущими при ходе плунжера вверх и тормозящими при ходе плунжера вниз. Поэтому в первую половину цикла при ходе плунжера вверх ЭД разгружается за счет дополнительных моментов создаваемых противовесами, а во вторую половину цикла он догружается. Величины противовесов выбирают так, чтобы обеспечивалось равенство моментов сопротивления или мощностей нагрузки ЭД за оба полуцикла. Условия равенства максимумов моментов или мощностей нагрузки в оба полуцикла легко проверить, измеряя токоизмерительными клещами токи, потребляемые ЭД из сети при ходе плунжера вверх и вниз. В этом случае показания амперметра во времени будут изменяться, достигая максимальных значений при средних положениях балансира. При идеальном уравновешивании должно соблюдаться условие: Iв=Iн,
где Iв – пиковое значение тока статора при движении плунжера вверх,
Iн – пиковое значение тока статора при движении плунжера вниз.
Если станок качалка не уравновешен, то степень неуравновешенности определяется формулой:
![]()
считается,
что станок-качалку следует доуравновешивать
если
![]() .
.