

3.4. Коэффициент полезного действия и коэффициент мощности электродвигателей станков-качалок.
В паспорте двигателя СК энергетические показатели η и cosφ (КПД и коэффициент мощности) указываются для номинального режима для длительной постоянной по величине номинальной нагрузки. Однако даже при идеальном уравновешивании станка-качалки график нагрузки двигателя остается неравномерным, так как не уничтожаются пульсации нагрузки, определяемые законом изменения скорости точки подвеса штанг. Из-за этого КПД и коэффициент мощности АД снижаются против номинальных значений. Это обусловлено тем, что при ухудшении уравновешивания станка-качалки увеличивается коэффициент формы Кф нагрузочного графика.
Коэффициент формы Кф равен отношению эффективной мощности Рэ к средней мощности Рср:
![]() .
.
КПД и коэффициент мощности зависят также от коэффициента загрузки двигателя Кз.
Снижение энергетических показателей двигателя приводит к росту непроизводительных потерь мощности и энергии.
Графики изменения КПД () и коэффициента мощности (cos) в функции нагрузки на валу двигателя называют рабочими характеристиками двигателя станка-качалки. Средние значения параметров за цикл качания называют циклическим КПД (ц) и циклическим коэффициентом мощности cosц. Для их вычисления существуют специальные формулы.
Степень снижения циклических (эксплуатационных) и cos при различных Кз и Кф показана на рис. 24.
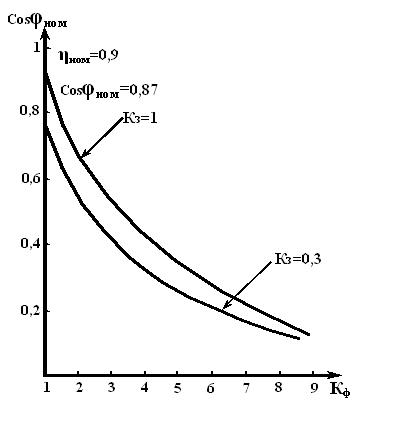
Рис. 24. Зависимость КПД и cos от коэффициента формы Кф и коэффициента загрузки двигателя Кз.
При плохом уравновешивании Кф ≥ 4 и низкой загрузке (Кз ≤ 0,3) происходит резкое увеличение потерь электрической энергии в 3 и более раз.
Поэтому при эксплуатации СК очень важно обеспечение выравнивания графика нагрузки двигателя и правильный подбор его мощности.
3.5. Особенности электроснабжения станков-качалок.
Большая часть СК относится ко II категории надежности электроснабжения, так как прекращение электропитания не вызывает серьезных осложнений при их дальнейшей эксплуатации.
Подача электропитания к станкам-качалкам обычно осуществляется по схеме глубокого ввода, т.е. повышенное напряжение 6 кВ подается по одной воздушной линии непосредственно к станку-качалке и трансформируется до 0,4 кВ. Для повышения надежности электроснабжения станков-качалок вводят автоматическое повторное включение линий, их кольцевание по схеме разомкнутого кольца. Имеющиеся линии целесообразно реконструировать так, чтобы длина одного плеча воздушной линии 6 кВ не превышала 6…8 км.
Для обеспечения электроснабжения станков-качалок применяют комплектные трансформаторные подстанции КТПСК мощностью 25-250 кВА трех модификаций: первая модификация предназначена для питания одной скважины; подстанции 2-ой и 3-ей модификации – служат для питания двух или трех скважин.
а) б)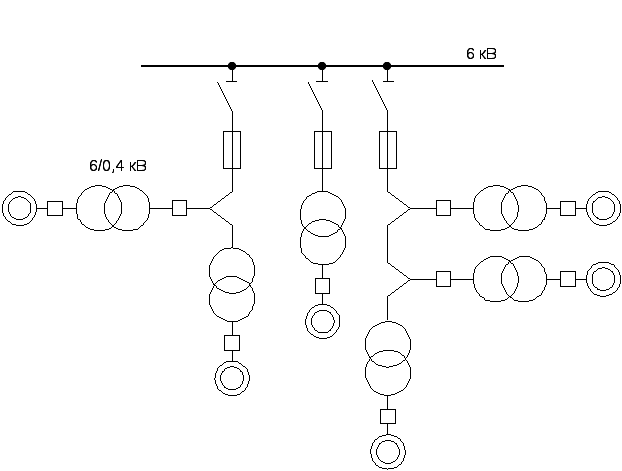

Рис. 25 Схемы питания глубиннонасосных установок при напряжениях распределительной сети 6 (а) и 0,38 (б) кВ.
3.6. Электродвигатели станков-качалок.
Для
привода станков-качалок наибольшее
применение получили асинхронные
короткозамкнутые двигатели в закрытом
обдуваемом исполнении серии 4А с
синхронной частотой вращения вала 1500
об/мин с повышенным пусковым моментом
(![]() от 2 до 2,2). Повышенный пусковой момент
достигается за счет специальной
конструкции обмотки ротора.
от 2 до 2,2). Повышенный пусковой момент
достигается за счет специальной
конструкции обмотки ротора.
Научно-производственным объединением «Элмаш» разработана специальная модифицированная серия асинхронных двигателей для привода станков-качалок серии 5А, АИР и др. с синхронной частотой вращения ротора от 500 до 1000 об/мин.
Отличительными особенностями этой модификации двигателей являются:
низкооборотные асинхронные двигатели для привода низкодебитных нефтяных скважин;
двухскоростные асинхронные двигатели повышенной мощности, позволяющие применять станки-качалки при любой дебитности скважин;
увеличенные пусковые моменты при невысоких кратностях пусковых токов;
усиленный подшипниковый узел со стороны свободного конца вала, позволяющий выдерживать повышенные шкивовые нагрузки;
климатические исполнения У1 и ХЛ1;
встроенная температурная защита.
С целью повышения коэффициента мощности на подстанциях, питающих СК, начали эксплуатировать на СК электроприводы с синхронными двигателями СДБ и СДБПК мощностью от 1,5 до 20 кВт и с частотой вращения 1500 об/мин.
Кратность пускового момента Кп=1,2÷1,8, кратность максимального момента Кmax ≥ 1,7, пусковой ток Iп=(3,5-5)Iн.
Несмотря на небольшую кратность входного момента, двигатели СДБ привода станка-качалки надежно втягиваются в синхронизм в период минимума нагрузки (при ходе плунжера вниз).
Эти двигатели при номинальной нагрузке работают с cosφ=1, а при снижении нагрузки генерируют реактивную мощность, отдавая ее в сеть, повышая результирующий коэффициент мощности сети.