

2.5.3.2. Электропривод постоянного тока по системе тп-д.
В буровых установках для бурения скважин глубиной 6,5-10 км в ЭП буровых насосов используются ДПТ, управляемые по системе ТП-Д. Система управления электроприводом включает в себя контур регулирования ЭДС двигателя и подчиненный ему контур регулирования тока. Регулятор ЭДС – пропорциональный (П-регулятор), регулятор тока – пропорционально-интегральный (ПИ-регулятор). Управление электроприводом осуществляется сельсинным командоаппаратом. Воздействуя на систему управления тиристорным преобразователем, плавно регулируют скорость двигателя (рис. 14).
В некоторых электроприводах буровых насосов регулирование скорости осуществляется ослаблением магнитного потока двигателя.
Буровыми насосами с регулируемым ЭП по системе ТП-Д оснащаются буровые установки БУ-2500 ЭП и БУ-6500 ЭП и установки морского бурения.
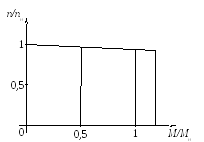
Рис. 14. Механическая характеристика регулируемого ЭП бурового насоса по системе ТП-Д.
2.5.3.3. Эп бурового насоса на базе вентильного двигателя.
Регулируемый ЭП бурового насоса может быть также реализован на базе вентильного двигателя. ЭП состоит из преобразователя частоты со звеном постоянного тока, инвертором и СД. Для управления инвертором используется бесконтактный датчик положения ротора двигателя. Выпрямленное напряжение через сглаживающий реактор подается на вход инвертора, тиристоры которого отпираются импульсами, вырабатываемыми системой управления в зависимости от сигналов датчика положения ротора. Регулировочные свойства вентильного ЭП аналогичны свойствам ЭП постоянного тока, диапазон регулирования Д=1:20.
Перспективным для ЭП буровых насосов является регулируемый ЭП по системе ПЧ-АД с КЗ ротором (преобразователь частоты – асинхронный двигатель с короткозамкнутым ротором).
Преимущества регулируемого ЭП буровых насосов особенно проявляются при турбинном бурении за счет наилучшего использования мощности БН, оптимизации режимов бурения и других факторов.
2.6. Автоматические регуляторы подачи долота.
Подача долота это последовательное опускание верхней точки КБТ в процессе бурения, при этом скорость подачи долота должна быть равна скорости разбуривания. При ручной подаче бурильщик периодически растормаживает барабан лебедки по показаниям амперметра (току статора) и индикатору веса КБТ.
Задача плавной и равномерной подачи долота решается применением автоматических регуляторов. При этом долото подается на забой автоматически в зависимости от параметров, характеризующих режим бурения, например, давления на забое или тока статора бурового двигателя. В зависимости от места расположения, автоматические регуляторы подачи долота бывают наземными или глубинными (погружными). Наземные регуляторы подачи по конструктивному признаку силового узла разделяют на электромашинные, гидравлические и фрикционные. Если конструкция силового узла позволяет только опускать КБТ с различной скоростью, то такие регуляторы называют пассивными. Если же имеется возможность не только опускать, но и приподнимать КБТ, то такие регуляторы называют активными. Электромашинные регуляторы подачи долота РПДЭ-3, РПДЭ-7, РПДЭ-8 (рис. 15) предназначены для поддержания режимов бурения скважин при турбинном и роторном бурении, они входят в комплект серийных буровых установок последних выпусков. Регулятор РПДЭ-7 используется для морских буровых установок.
в
схему управления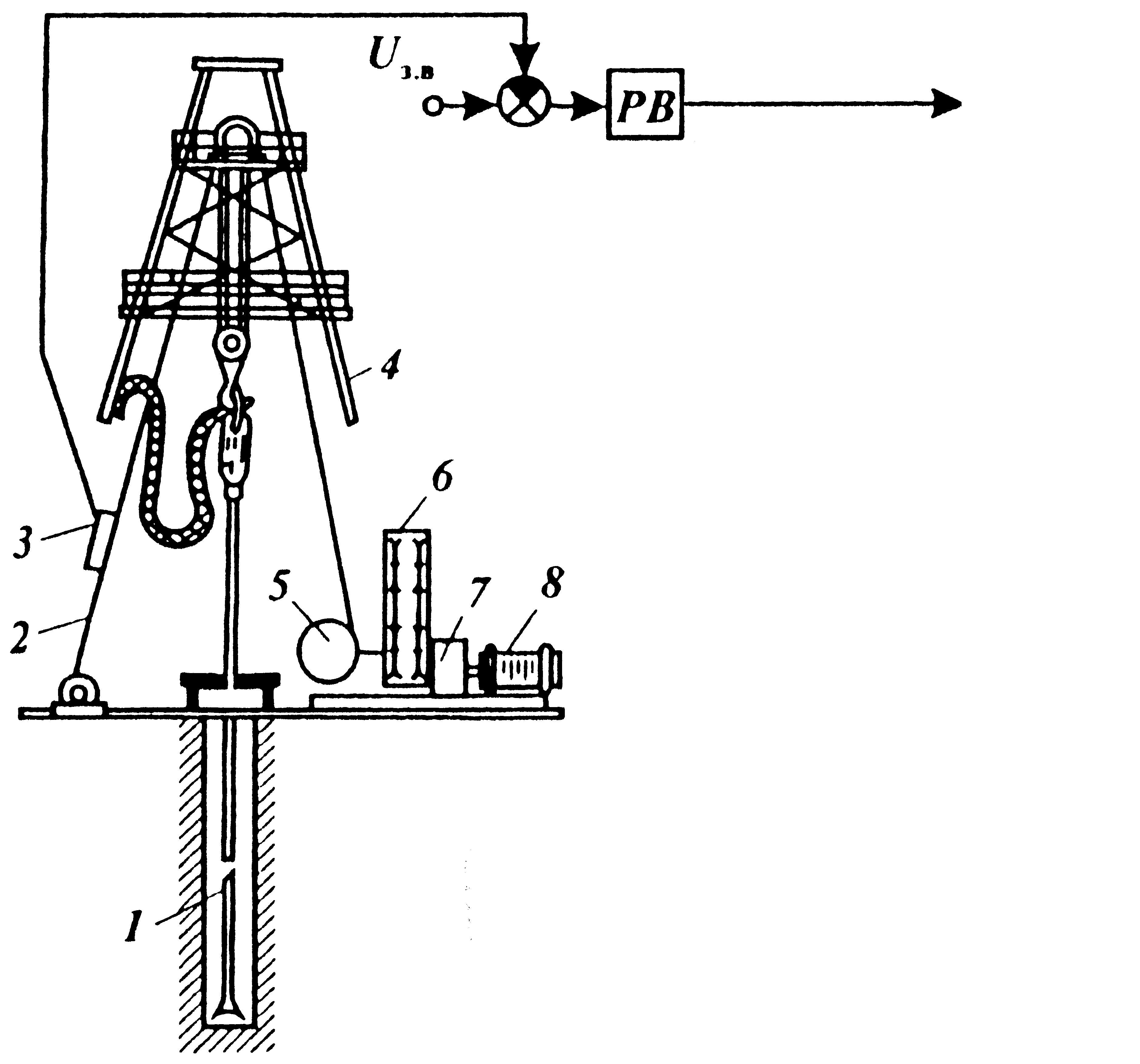
Рис. 15. Конструктивная схема регулятора подачи долота РПДЭ-8:
1 – бурильный инструмент; 2 – талевый канат; 3 – датчик веса; 4 – буровая вышка; 5 – барабан лебедки; 6 – цепная передача; 7 – редуктор; 8 – электродвигатель.
Регуляторы подачи долота РПДЭ-7 и 8 оснащены электроприводом по системе ТП-Д, РПДЭ-3 по системе Г-Д. Объектом регулирования в автоматической системе подачи долота является буровой инструмент. Входной величиной для объекта регулирования служит скорость подачи, а выходной - нагрузка на долото. В серийно выпускаемых регуляторах подачи электромашинного типа использован способ поддержания заданной нагрузки на долото путем формирования скорости подачи. При этом нагрузка на долото является разностью между полным весом КБТ и усилием на крюке.
Система регулирования нагрузки на долото работает по принципу отклонения. Отклонение нагрузки от заданного значения через систему управления ЭП изменяет скорость подачи долота и восстанавливает нагрузку на долото до заданного значения.
К основным параметрам ЭП регулятора подачи относятся установленная мощность привода и максимальная частота вращения, соответствующая максимальной скорости перемещения КБТ. Совмещение функций регулятора подачи и аварийного привода рассчитанного на подъем КБТ максимального веса со скоростью, достаточной для предотвращения осложнений в стволе скважины приводит к тому, что параметры ЭП регулятора подачи долота выбираются не по основному, а по аварийному режиму.
ЭП регулятора подачи долота используется также для подъема и кратковременного приложения максимальной нагрузки при монтаже и испытаниях буровой вышки. На буровых установках используются приводные двигатели регулятора мощностью от 55 до 90 кВт с номинальной частотой вращения от 1000 до 1180 об/мин.
Опыт эксплуатации регуляторов подачи долота показал что используемый в них способ регулирования дает удовлетворительные результаты при проходке относительно мягких однородных пород. При бурении твердых и неоднородных пород, вследствие сложной динамической зависимости между нагрузкой на долото и механической скоростью подачи верхнего конца КБТ, в системе управления могут возникать автоколебательные процессы. Перспективным является отказ от использования датчика веса и косвенной оценки регулируемого параметра по величине тока якоря исполнительного двигателя и математической модели процесса.