

2.8.2. Описание электробура с короткозамкнутым асинхронным двигателем.
Идея переноса электродвигателя на забой скважины была впервые реализована в СССР в 1937—1940 гг. Схема установки для бурения электробуром показана на рис. 16.
Долото 1 с электробуром 2 опускается в скважину на бурильных трубах 3. Внутри каждой трубы вмонтирована кабельная секция длиной 12-13 метров, состоящая из отрезка кабеля 4, контактного стержня и муфты. При соединении секции муфта и стержень плотно сочленяются и создают надежный контакт. Сопротивление изоляции между жилами кабеля и между каждой жилой и корпусом должно быть не менее 2000 Ом на секцию.
Электроэнергия от распределительного устройства 14 через трансформатор 15 и станцию управления 16 с помощью наружного кабеля 9 через токоприемник 8, кабельную секцию в ведущей трубе 7 и двухжильный шланговый резиновый кабель подводится к электробуру. В качестве третьего провода в системе питания двигателя электробура используют бурильные трубы.
По сравнению с трехпроводным токопроводом, токоподвод по системе два провода–труба обладает повышенной надежностью из-за уменьшенного числа контактов и имеет меньшее гидравлическое сопротивление из-за уменьшенного диаметра кабеля.
Буровой раствор, прокачиваемый через шланг 10, вертлюг 11, ведущую трубу 7, бурильные трубы, полый вал электробура, долото и выходит в затрубное пространство.
Вращение бурильных труб для производства вспомогательных операций осуществляется при помощи ротора 5. Нагрузка на долото создается силой тяжести бурильных труб. Для подачи долота на забой служит автоматический регулятор подачи долота 13. Для управления электробуром служит пульт 6, установленный у рабочего места бурильщика.
Электробур состоит из двух основных частей: погружного двигателя и шпинделя с пятами для передачи вращающего момента от двигателя на долото. Вал двигателя соединен с валом шпинделя зубчатой соединительной муфтой.
Двигатель работает в скважине на большой глубине и среде бурового раствора, давление которого может достигать 40-50 МПа. Для предохранения двигателя электробура от проникновения бурового раствора, который может вызвать повреждение изоляции обмоток и преждевременный абразивный износ его узлов и деталей, применяют систему масляной защиты. Внутреннюю полость двигателя электробура заполняют трансформаторным маслом, давление которого превышает давление окружающей среды.
Герметизацию внутренней полости двигателя электробура обеспечивают торцовые уплотнения вращающихся валов и резиновые кольца в неподвижных соединениях.
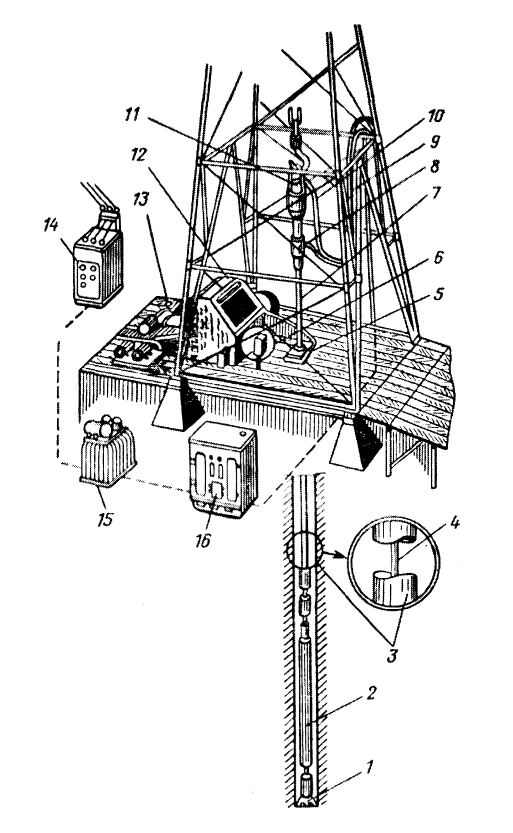
Рис. 16 – Общий вид буровой установки с электробуром.
Современный серийный двигатель электробура представляет собой асинхронный двигатель высокого напряжения с короткозамкнутым секционированным ротором. Статор двигателя размещен в цилиндрических корпусах, соединенных между собой коническими резьбами. В корпусе статора запрессованы пакеты магнитной стали, чередующиеся с немагнитными пакетами. Последние установлены для того, чтобы избежать шунтирование магнитного потока через шарикоподшипники и уменьшить потери от вихревых токов, возникающих в местах расположения промежуточных опор ротора. Выводные концы обмотки статора соединены кабелем с контактным стержнем, при помощи которого двигатель подключен к кабелю, расположенному в бурильных трубах. Ротор двигателя имеет полый вал с центральным каналом для прохода бурового раствора. На валу насажены секции ротора с алюминиевой «беличьей клеткой», между ними расположены промежуточные подшипники.
Для создания внутри двигателя избыточного давления, компенсации утечки масла через уплотнения и изменения объема масла при нагревании электробур снабжен лубрикаторной системой.
Внутри трубы лубрикатора расположен поршень с пружиной. При заполнении двигателя вязким маслом поршень поднимается и сжимает пружину, находясь под давлением бурового раствора и пружины. Таким образом, независимо от давления окружающей среды внутри двигателя всегда существует избыточное давление, под влиянием которого масло вытекает наружу, препятствуя этим проникновению бурового раствора внутрь машины.
У электробура имеется запас масла для нормальной работы в течение 15-20 ч. За этот промежуток времени для смены долота электробур поднимают на поверхность и, если необходимо, добавляют масло в лубрикаторную систему.
Возникающие при электробурении толчки нагрузки должны преодолеваться благодаря высокой перегрузочной способности двигателя. Диаметр погружных двигателей невелик, поэтому момент инерции их роторов незначителен. Вследствие этого двигатели электробуров должны иметь жесткую механическую характеристику и значительную кратность максимального момента.
Особенность двигателей электробуров заключается в повышенном скольжении в режиме номинальной нагрузки и значительном пусковом моменте, достигающем (1,2—1,7) Мном. Выбор такой характеристики обусловлен стремлением обеспечить максимально возможный пусковой момент, сопровождаемый небольшой кратностью пускового тока.
Технические характеристики электробура Э190-8-8М: диаметр бура – 190 мм; длина – 12860 мм; мощность – 125 кВт; номинальное напряжение – 1300 В; номинальный ток статора – 125 А; частота вращения ротора – 675 об/мин; номинальный момент – 1800 Н∙м; максимальный момент – 3800 Н∙м; КПД – 67,5 %; коэффициент мощности — 0,66; масса – 2,13 т.
Расшифровка в обозначении электробура: Э – электробур; трехзначное число – диаметр электробура, мм; цифра после тире – число полюсов двигателя; буква М — модернизированный.
Электробур получает питание от сети 6 кВ через ячейку с выключателем распределительного устройства высокого напряжения и трехобмоточный трансформатор, средняя обмотка которого предназначена для электробура и имеет пределы регулирования напряжения от 1085 до 2270 В с изменением мощности от 270 до 560 кВА. Обмотка низшего напряжения – 525 В предназначена для питания электродвигателя привода буровой лебедки.
Управление электродвигателем электробура осуществляется комплектным устройством управления и защиты УЗЭБ-83.
Перспективным направлением в электробурении является разработка регулируемого электропривода переменного тока по системе «преобразователь частоты – короткозамкнутый асинхронный двигатель» или использование вентильного двигателя с постоянными магнитами.