

2.4.4. Электропривод буровой лебедки в режиме подъема.
1. Электропривод бл на базе асинхронного двигателя с фазным ротором.
ЭП буровой лебедки ранее выпускавшихся буровых установок оснащен АД с фазным ротором и релейно-контактными системами переключений ступеней сопротивлений в цепи ротора. Для уменьшения числа ступеней в последней ступени использован активно-индуктивный контур.
Структурная схема электропривода на базе асинхронного двигателя с фазным ротором показана на рис. 7. Электропривод содержит приводной асинхронный двигатель АД с пусковыми реостатами ПР, редуктор Р, буровую лебедку БЛ и электротормоз ЭТ.
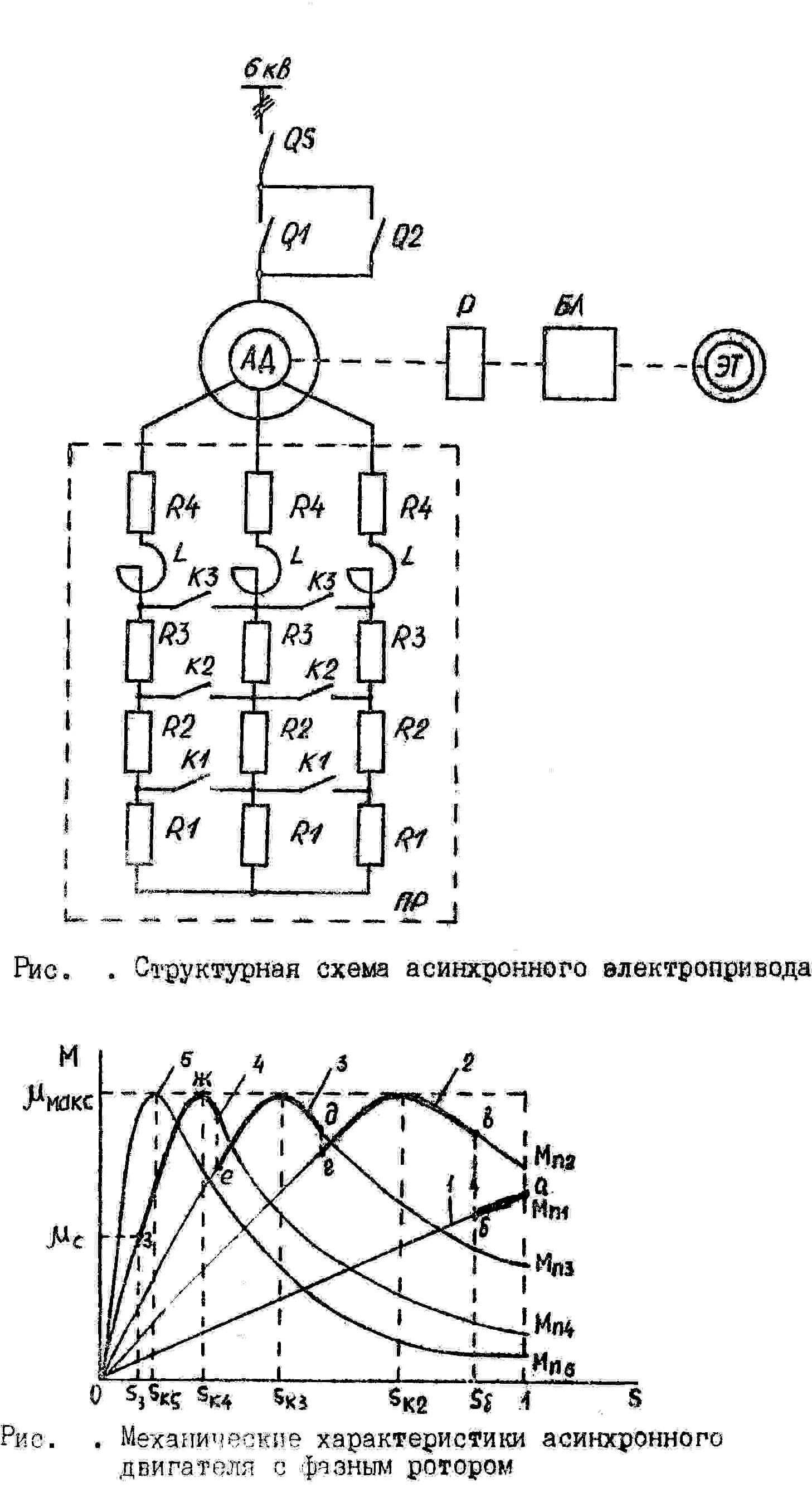
Рис. 7. Структурная схема асинхронного электропривода с фазным ротором.
Пуск и разгон АД после включения разъединителя QS и реверсивного контактора Q1, Q2 производится под нагрузкой. При этом для успешного разгона необходимо, чтобы в процессе всего разгона момент, развиваемый двигателем, был больше статического момента сопротивления, причем на такую величину, чтобы обеспечить разгон за заданное время. Для обеспечения высокого пускового момента в цепь ротора включаются пусковые реостаты ПР, а также дроссель (катушка индуктивности) L. Кроме трех пусковых реостатов в каждую фазу в цепь ротора введен невыключаемый реостат R4.
Процесс пуска двигателя начинается при всех включенных реостатах, т.е. по механической характеристике 1 (рис. 8). При этом двигатель имеет пусковой момент Мп1 (точка «а»). Пусковой момент Мп1 составляет обычно не более 60% от Ммакс. Это необходимо для снижения механических ударов при выборе зазоров и люфтов в трансмиссиях. На участке аб двигатель разгоняется по 1-ой характеристике.
Ммакс Мс М


Рис. 8. Механические характеристики асинхронного двигателя с фазным ротором.
К моменту достижения точки «б» выбираются все зазоры и люфты и должен начаться подъем колонны. Поэтому в момент достижения точки «б» автоматически включаются контакты К1 и реостаты R1 оказываются закороченными (выключенными). При этом рабочая точка с характеристики 1 переходит на характеристику 2 в точке «в». Точке «в» соответствует достаточно большой развиваемый двигателем момент, которого достаточно для трогания колонны с места и разгона по характеристике 2. В точке «г» автоматически включаются контакты К2, что приводит к выключению реостатов R2. Рабочая точка переходит на характеристику 3 в точку «д». В схеме остаются только реостаты R3 и R4.
Когда в цепи ротора останутся только дроссель и невыключаемые реостаты R4, процесс разгона по характеристике 4 продолжается до тех пор, пока момент Мi, развиваемый двигателем, не снизится до статического момента сопротивления Мс на валу, обусловленного весом колонны, то есть до точки «з», где процесс разгона заканчивается и начинается этап подъема колонны с установившейся скоростью.
Дроссель L в цепи ротора служит для снижения бросков момента, а также бросков тока ротора и статора при переходе с одной характеристики на другую.
Частота тока ротора f2 изменяется в процессе разгона от f1=50 Гц при пуске до 1…2 Гц при номинальных оборотах. При снижении частоты f2 постепенно снижается индуктивное сопротивление и плавно растет ток ротора, что и приводит к снижению бросков тока и момента при переключении с одной характеристики на другую.
Ротор асинхронного двигателя связан с валом лебедки через четырехступенчатый редуктор Р, который служит для ступенчатого изменения скорости подъема колонны.