

2.4.5. Электропривод буровой лебедки в режиме спуска.
Значения скорости спуска КБТ обычно составляют 2,53 м/с в осложненных условиях бурения и при спуске обсадной колонны – 0,20,5 м/с.
Спуск КБТ и обсадных труб может осуществляться с помощью индивидуального приводного ЭД постоянного тока, используемого в режиме рекуперативного или динамического торможения, при постоянной мощности.
Рекуперативное торможение с отдачей энергии в сеть осуществляется в случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его эдс больше приложенного напряжения. Ток меняет направление и момент становится тормозным.
Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор (генераторный режим работы). При этом обмотка возбуждения подключена к сети. Энергия генератора выделяется на резисторе в виде тепла. Управление моментом и скоростью осуществляется регулированием тока возбуждения.
Кроме того, в процессе спуска, при отсутствии возможности торможения приводным двигателем, могут быть использованы электромагнитные тормоза индукционного или ферропорошкового типа.
К основным параметрам привода относятся максимальная и минимальная частота вращения при спуске. Мощность при торможении меньше мощности, расходуемой на подъем КБТ.
Выбор скорости спуска колонны, номинального веса и закона регулирования зависит от ряда условий. Для обеспечения наибольшей производительности при спуске частоту вращения нужно принимать близкой к предельной из условия номинального нагрева двигателя. При применении системы динамического торможения следует иметь в виду, что скорость спуска обуславливает габариты и мощность резистора, включаемого в цепь обмотки якоря.
Применение ЭД переменного тока в качестве электрического тормоза в серийных буровых установках не реализуется из-за усложнения схемы управления и необходимости торможения через цепную передачу.
При использовании в режиме спуска КБТ индукционного тормоза ЭМТ (рис. 10) управление током возбуждения осуществляется от тиристорного преобразователя ТП. Схема управления тормозом обеспечивает свободный разгон колонны бурильных труб под действием собственного веса, автоматическое поддержание заданной установившейся скорости, интенсивное торможение КБТ при подходе к столу ротора. Необходимое значение тормозного момента в режиме замедления при подходе элеватора к роторному столу задается форсированием возбуждения с помощью сельсинного командоаппарата СК. Обратная связь по скорости осуществляется от тахогенератора BR, обратная связь по току – с добавочного сопротивления в цепи обмотки возбуждения ОВ. Структура системы управления ферропорошковым тормозом аналогична рассмотренной структуре индукционного тормоза, однако она обеспечивает дополнительную функцию пассивного регулятора подачи долота.
а) б)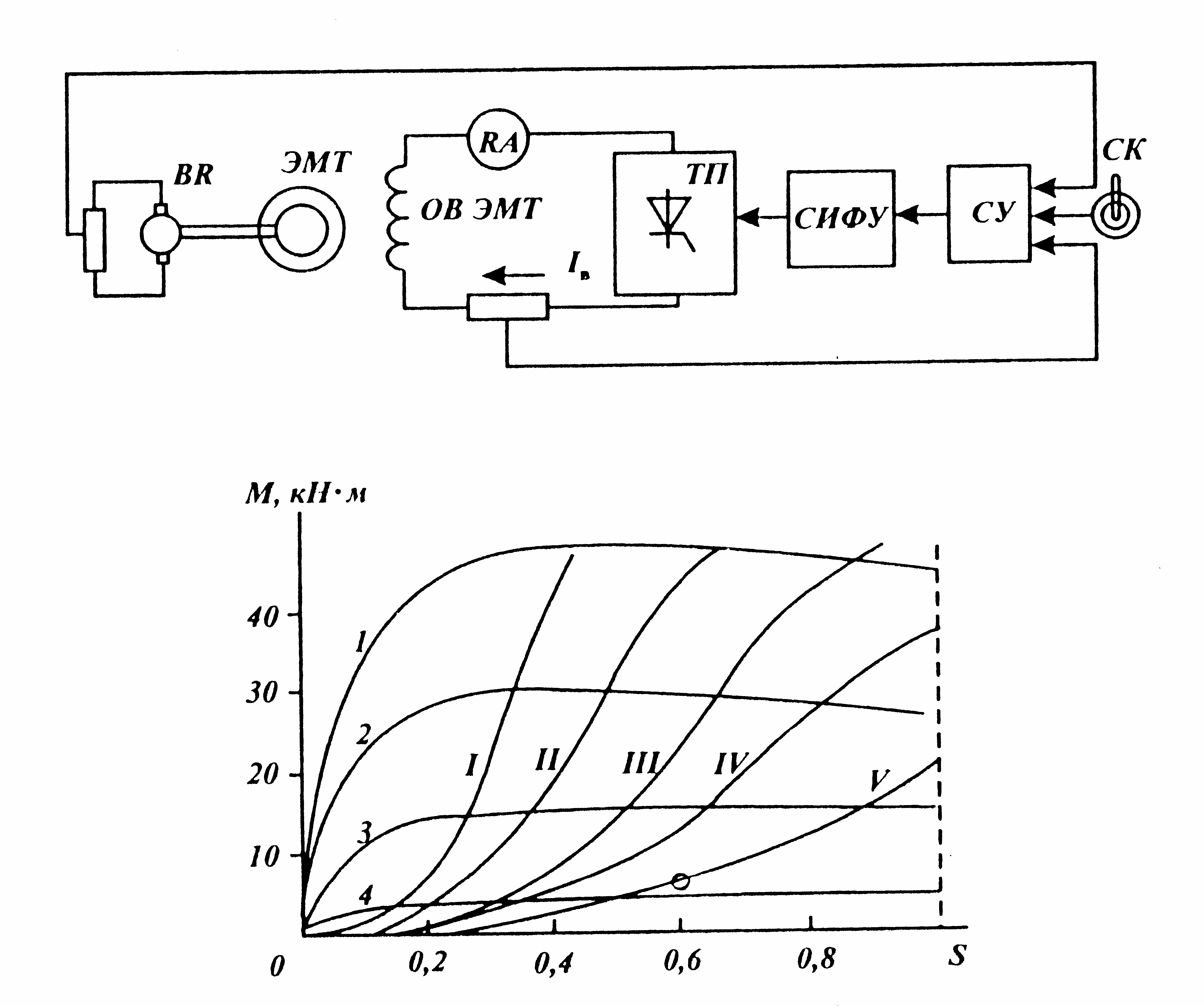
Рис. 10. Функциональная схема управления током возбуждения индукционного тормоза (а) и механические характеристики (б) (на примере тормоза ЭМТ-4500):
1-4 – характеристики соответственно при токе возбуждения, равном 1; 0,75; 0,5 и 0,25 номинального тока возбуждения; I-V – то же при наличии обратной связи по скорости для различных положений командоаппарата.
СИФУ – система импульсно-фазового управления;
СУ – суммирующий усилитель.