

3.7. Системы управления электроприводами станков-качалок.
Для управления двигателем станка-качалки применяются блоки управления серии БГШ (достаточно простые и надежные) на токи 15, 20, 40 и 100 А. Более современными являются блоки с микропроцессорным управлением БУС-3, БУС-4, СУС и др. Блоки управления выполняют следующие функции:
пуск и отключение двигателя в ручном режиме;
автоматическое отключение электродвигателя при обрыве одной из фаз;
отключение электродвигателя при перегрузках, сверх допустимого предела;
отключение электродвигателя при КЗ в его обмотках или кабеле;
отключение электродвигателя при исчезновении или глубоком снижении напряжения и автоматический пуск электродвигателя при восстановлении напряжения в питающей сети после его кратковременного исчезновения или понижения с помощью реле времени;
отключение электродвигателя при аварийном состоянии скважины.
3.8. Проблема самозапуска станка-качалки.
При одновременном запуске нескольких станков-качалок пусковые токи складываются, что приводит к снижению напряжения на двигателях из-за его потери в проводах. Поэтому для обеспечения нормальной работы системы электроснабжения станков-качалок применяют 2 способа автоматического повторного включения (АПВ) двигателей станков-качалок после исчезновения или снижения напряжения:
индивидуальный;
групповой.
При индивидуальном АПВ после восстановления номинального напряжения сети двигатель вновь подключается к ней с некоторой выдержкой времени. Для разных групп двигателей, питающихся от одного источника, создаются разные выдержки времени для предотвращения наложения пусковых токов. Наибольшая выдержка времени зависит от типа реле времени и составляет 14 и 20 сек. При групповом АПВ при исчезновении или глубоком снижении напряжения отключаются магистрали, к которым подключен двигатель на питающей подстанции. АПВ осуществляется включением магистрали в определенной последовательности с разными выдержками времени.
3.9. О регулируемом электроприводе станков-качалок.
Станки качалки чаще всего относятся ко второй категории надежности электроснабжения. Однако в работах со сложными условиями эксплуатации эти установки относятся к первой категории, т.к. повторный пуск скважины может быть осложненным из-за образования песчаных пробок.
Необходимость установления оптимального режима отбора жидкости в начале и в конце эксплуатации нефтяной скважины требует применения на станках-качалках регулируемого электропривода. Следует также иметь ввиду, что при большом содержании песка в откачиваемой жидкости после пуска скважины возникает необходимость увеличивать частоту качания.
В настоящее время в большинстве случаев режим работы станка-качалки регулируется изменением длины хода плунжера насоса за счет перестановки пальцев на кривошипе или изменением числа ходов при помощи сменных шкивов на валу приводного электродвигателя, что связано с трудоемкостью работ и необходимостью остановки станка-качалки. Это приводит к потерям нефти, а иногда к образованию песчаных пробок и заклиниванию плунжера. Кроме того, при таком изменении режима откачки жидкости часто нарушается уравновешенность станка-качалки. Для обеспечения эксплуатации станка-качалки с регулируемым режимом работы могут быть использованы различные схемы электропривода.
Для регулирования частоты вращения можно использовать двигатели постоянного тока (ДПТ), многоскоростные АД, СД с коробками передач или СД с постоянными магнитами (вентильные двигатели), или АД с частотным регулированием скорости вращения.
Возможные принципиальные схемы регулируемого электропривода станков-качалок изображены на рис. 26.
На рис. а изображена система тиристорного электропривода постоянного тока, состоящая из согласующего трансформатора ТС, управляемого выпрямителя УВ на тиристорах и неуправляемого выпрямителя В для питания ОВ приводного двигателя и системы управления, которая может предусматривать регулирование частоты вращения в широком диапазоне, а также автоматизацию управления приводом по заданной программе или в функции от какого-либо параметра режима работы установки. Недостатком схемы является низкий КПД из-за потерь в трансформаторе и выпрямителе и высокая стоимость.
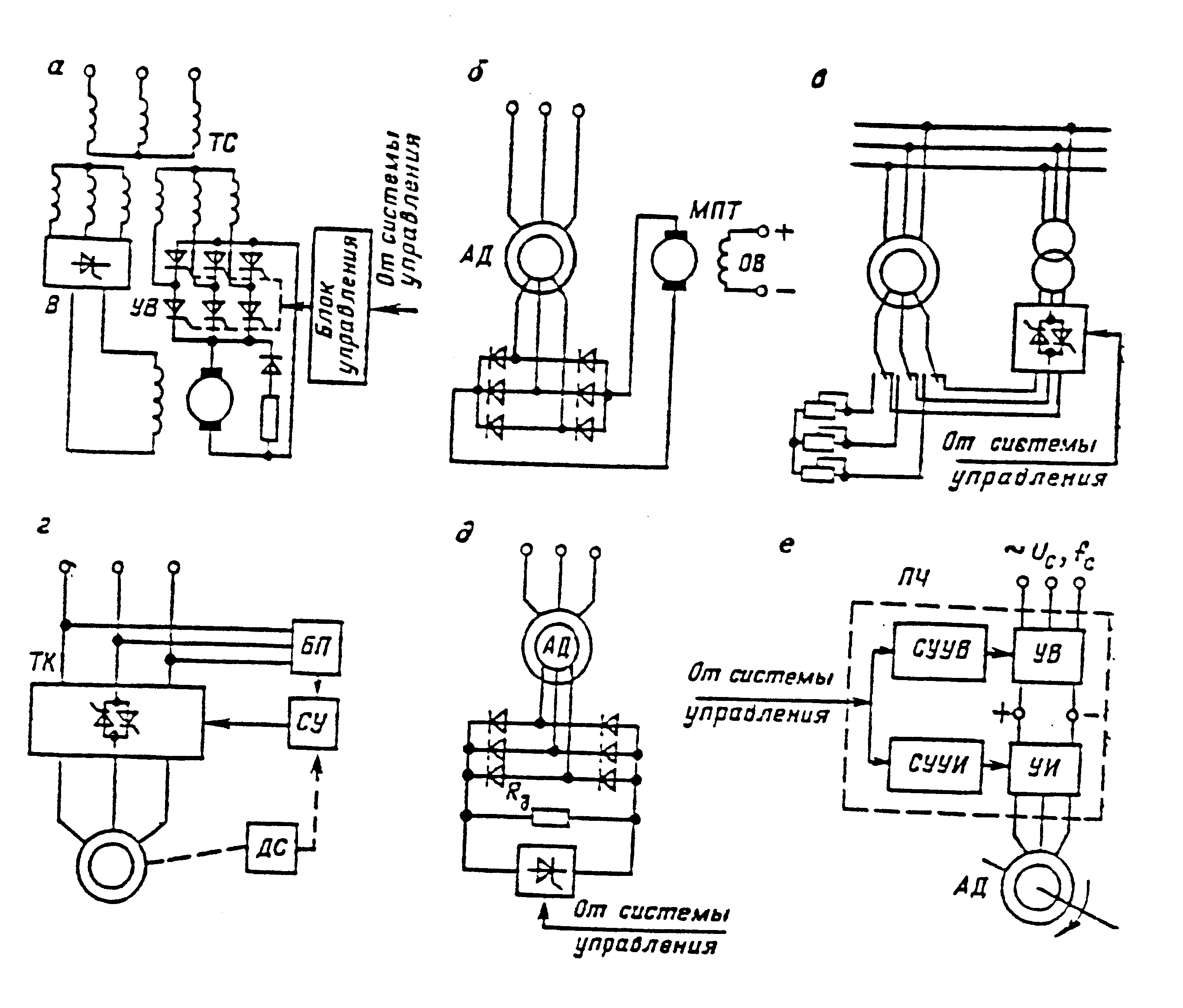
Рис. 26. Принципиальные схемы систем регулируемого электропривода станков-качалок.
На рис. б изображен асинхронный вентильно-машинный электромеханический каскад, состоящий из АД с контактными кольцами и машины постоянного тока независимого возбуждения. В однокорпусном агрегате ротор АД и якорь машины постоянного тока с коллектором расположены на одном валу. Полюса машины постоянного тока и статор АД смонтированы на общей станине. Напряжение с обмотки ротора АД через контактные кольца подается через выпрямитель на якорь машины постоянного тока. Регулирование скорости вращения АД производится изменением тока возбуждения ДПТ. Входящая в электропривод станция управления обеспечивает регулирование частоты вращения от 430 до 1380 об/мин.
На рис. в изображен асинхронный вентильный двухзонный каскад, обеспечивающий запуск и разгон двигателя до полусинхронной скорости посредством пускового реостата, а дальнейшее регулирование в диапазоне от 0,5 до 1,5 значения номинальной скорости осуществляется с рекуперацией энергии скольжения в питающую сеть через преобразователь частоты без выраженного звена постоянного тока в цепи ротора. Добавочная ЭДС регулируется изменением угла управления вентиля.
На рис. г приведена схема силовой части регулируемого электропривода переменного тока по системе трехфазный тиристорный коммутатор – АД. Схема имеет диапазон регулирования D=1:1,5. Для получения необходимой жесткости характеристик и устойчивых значений пониженной частоты вращения предусмотрена обратная связь по скорости при помощи датчика скорости ДС, подающего сигнал на систему управления. Напряжение регулируется при помощи трехфазного тиристорного коммутатора ТК.
На рис. д представлена система регулируемого тиристорного электропривода с импульсным управлением на базе АД с фазным ротором, которая предусматривает регулирование частоты вращения импульсным шунтированием сопротивления Rд в цепи выпрямленного тока ротора при помощи тиристорного коммутатора с гасящей цепью. Обратная связь по скорости обеспечивает достаточную жесткость характеристики в диапазоне регулирования частоты вращения D=1:2. Импульсный метод регулирования скорости производят периодически кратковременным изменением параметров двигателя. Требуемая скорость вращения обеспечивается в виде средней скорости.
На рис. е представлена схема частотного управления АД с помощью преобразователя частоты со звеном постоянного тока и синусоидальной широкоимпульсной модуляцией выходного напряжения. УВ преобразует напряжение сети промышленной частоты в постоянное напряжение путем изменения величины угла управления тиристора, а управляемый инвертор УИ преобразует постоянное напряжение в трехфазное напряжение регулируемой частоты. Регулирование выпрямленного напряжения осуществляется при помощи СУУВ, а частота выходного напряжения задается блоком СУУИ.
Перспективным для станков-качалок является регулируемый электропривод по системе полупроводниковый преобразователь частоты – асинхронный короткозамкнутый двигатель. В объединении «Татнефть» прошел производственные испытания преобразователь частоты с непосредственной связью. Недостатками этой разработки является недоиспользование мощности электродвигателя (60-70% установленной мощности) из-за принципиальной невозможности обеспечить на выходе частоту, близкую к частоте сети и сравнительно низкий коэффициент мощности.