Омс с помощью импульсно-фазовых рнс «Лоран-с» (сша)
П ринцип
действия.
В основе работы РНС «Лоран-С» лежат
импульсный
и фазовый методы измерения разности
расстояний
ринцип
действия.
В основе работы РНС «Лоран-С» лежат
импульсный
и фазовый методы измерения разности
расстояний
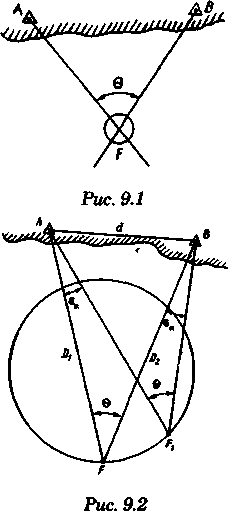
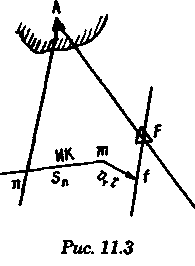
Cущность импульсного метода заключается в следующем. В точке приема (на судне) измеряют интервал времени ∆t = t1 – t2 между моментами прихода двух коротких импульсов, посылаемых двумя береговыми станциями. Одна из станций (А) является ведущей (Вщ), другая (В) — ведомой (Вм) (см. рис. 15.2). Разность расстояний ∆D от места судна К до радиостанций находят по формуле
![]()
В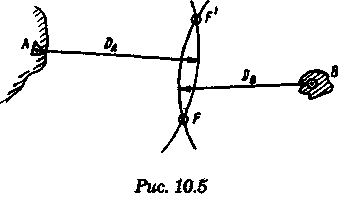 еличину
∆t
определяют с помощью судового
приемоиндикатора. Одной и той же разности
расстояний ∆D
соответствуют две изолинии (II
и I’I’
на рис. 15.2), так как гипербола является
кривой, симметричной относительно
мнимой оси.
еличину
∆t
определяют с помощью судового
приемоиндикатора. Одной и той же разности
расстояний ∆D
соответствуют две изолинии (II
и I’I’
на рис. 15.2), так как гипербола является
кривой, симметричной относительно
мнимой оси.
Каждому значению ∆t будет соответствовать только одна гипербола.
Место судна будет находиться в точке пересечения двух гипербол. Вторая гипербола получается по второй паре станций.
Р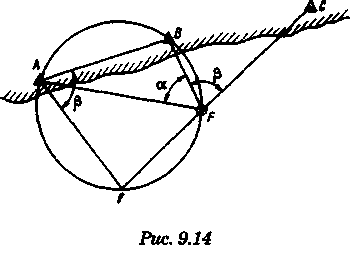 абота
РНС «Лоран-С» основана на измерении
промежутка времени между моментами
прихода импульсов от ведущей и ведомой
станций и на измерении разности фаз
высокочастотных колебаний, заполняющих
импульс.
абота
РНС «Лоран-С» основана на измерении
промежутка времени между моментами
прихода импульсов от ведущей и ведомой
станций и на измерении разности фаз
высокочастотных колебаний, заполняющих
импульс.
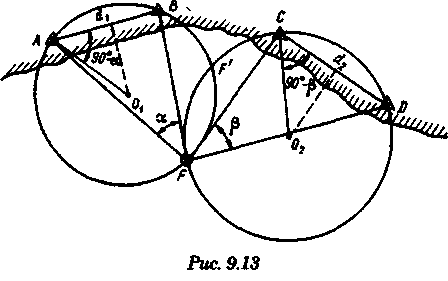
Что один из двух предметов закрыт для обзора, то, измерив пеленг одного предмета, можно секстаном измерить горизонтальный угол с другой точки на судне. Для получения места на карте прокладываем ИП предмета А (рис. 12.1) и затем пеленг предмета В, рассчитанный по формуле ИПВ = ИПА + α.
По пеленгу и высоте светила. Если в момент взятия пеленга или радиопеленга измерить высоту светила, то место судна определяется в точке пересечения круга равных высот и линии пеленга. На практике круг равных высот заменяют высотной линией положения. Угол пересечения линий положения будет равен углу между пеленгом и направлением линии положения.
По расстоянию и горизонтальному углу.
Когда в видимости имеются два объекта, но есть сомнение в поправке компаса - при длительных стоянках на рейде при выключенном гирокомпасе. Измерив горизонтальный угол с помощью секстана или как разность двух КП, определим расстояние до одного ориентира. Обсервованное место судна найдется в точке пересечения окружностей — изолиний горизонтального угла и расстояния. Если затем снять с карты ИП на предметы и сравнить их с компасными, можно проверить поправку гирокомпаса.
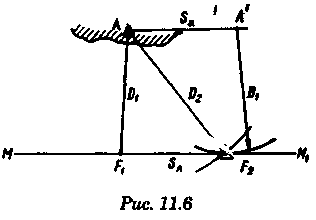
По изолинии пеленга или расстояния и глубине(12.2).
как точку пересечения полученной линии положения и соответствующей изобаты.Таким образом, место судна можно считать на пеленге, где глубина соответствует измеренной.
Место судна, найденное таким способом, следует считать приближенным.