

Точность измерения навигационного параметра оценивают:
-статистической обработкой серии измерений;
-расчетом средних статистических значений ошибок измерений на основе обобщения опыта плавания (априорно);
-принятием значений ожидаемых ошибок в измерении навигационных параметров по данным технических условий на приборы или системы. Наиболее простым способом расчета m — средней квадратичной ошибки измерения при равноточных наблюдениях — является способ с использованием коэффициента размаха k.
![]()
![]()
Систематические ошибки — это ошибки, величина и направления которых постоянны или изменяются по определенному закону. Систематические ошибки, как правило, должны исключаться введением поправок или специальной организацией наблюдений и их обработкой.
Если на измерения двух навигационных параметров влияют какие-то общие факторы, то ошибки таких измерений оказываются взаимозависимыми. Эта зависимость характеризуется коэффициентом корреляции г. Оценки точности измерений, полученные по результатам тех измерений, для характеристики точности которых они служат, называются апостериорными. Для вывода такой оценки необходима серия из 9... 11 измерений. В практике судовождения такие наблюдения практически невозможны, поэтому здесь широко применяются априорные оценки, полученные на основе обобщения ранее накопленного опыта.
,
Вопрос №5.
НФ НП НИ
Для определения обсервованных координат с помощью различных навигационных средств измеряются навигационные параметры (НП).
НП-это линейные или угловые величины , функционально зависящие от координат места судна и координат навигационных ориентиров.
навигационные параметры:
•Дистанция до ориентира (D)
•Пеленг на ориентир (П). Здесь под пеленгом понимается истинный пеленг (ИП), но для упрощения записей в сокращении будем использовать букву П.
•Горизонтальный угол между двумя ориентирами ()
•Вертикальный угол ориентира ()
•Разность расстояний до двух ориентиров (D)
•Высота светила (h)
множество значений НП определяют навигационную функцию (НФ), т.е. зависимость НП от координат места судна
НФ- это математическая зависимость НП от координат места судна
U=f(,)
НИ- это геометрическое место точек равных значений навигационных параметров U0=f(,)=const
ее вектор-градиент g , который характеризует максимальную скорость изменения навигационной функции Градиент навигационной функции - это вектор максимальной скорости изменения НФ в конкретной точке поля навигационных параметров, который направлен по нормали к навигационной изолинии в сторону увеличения НП.
![]()
![]()
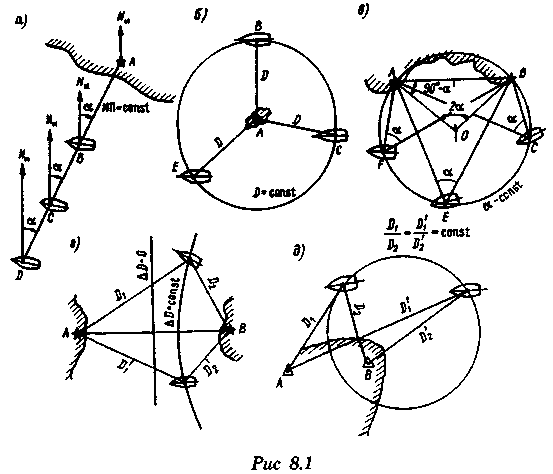
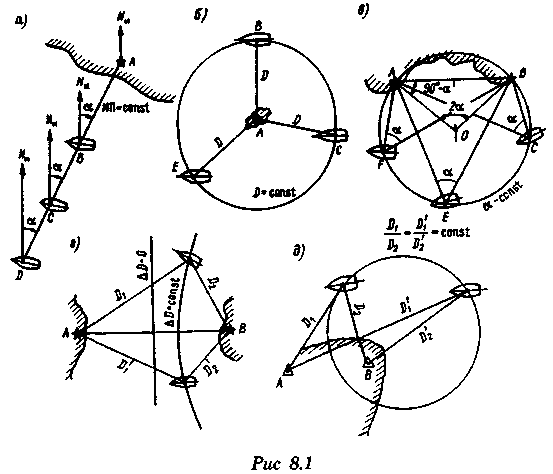
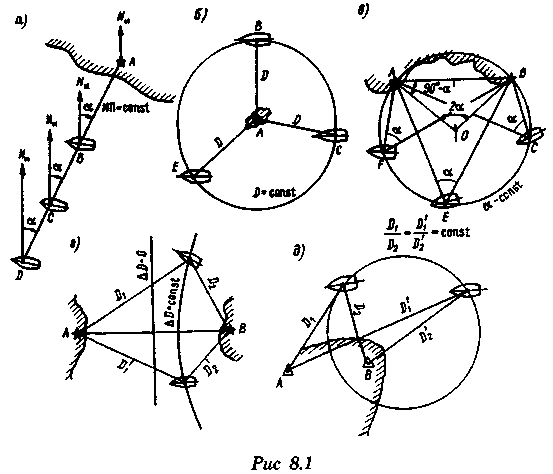
Пеленг. На судне измерен истинный пеленг (ИП) предмета А (рис. 8.1, а), равный α. Проложив на карте линию пеленга AD, можно утверждать, что судно в момент взятия пеленга находилось на этой линии, так как в противном случае значение пеленга было бы отличным от измеренного. Однако неизвестно, в какой точке (В, С, D) на линии пеленга находится судно. Прямая линия AD, отвечающая условию ИП = α, на которой находилось судно в момент наблюдения, будет называться изолинией пеленга или изопеленгой (изоазимутой на сфере).
Расстояние. Измерено расстояние D между судном и ориентиром А (рис. 8.1, б). В этом случае судно будет находиться на окружности радиусом D с центром в точке А. Эта окружность будет называться изолинией расстояния или изостадией.
Горизонтальный угол. Если измерен горизонтальный угол между предметами А и В (рис.8.1, в) равный α, или этот угол вычислен как разность двух пеленгов α = ИП2 – ИП1, то вершина горизонтального угла будет лежать на окружности, проходящей через точки А и B, а центр окружности О будет находиться на перпендикуляре к линии АВ в точке его пересечения с линией, проведенной под углом 90°- α к линии AB (рис. 8.1, в). Эта окружность называется изолинией горизонтального угла α или изогоной.
Разность расстояний. В некоторых радионавигационных системах измеряется разность расстояний до двух ориентиров. Тогда изолинией разности расстояний будет гипербола (рис. 8.1, г).
Линией положения называется прямая, заменяющая участок навигационной изолинии вблизи счислимого места судна.
Градиенты навигационных параметров
Пеленг![]()
Расстояние
![]()
Разность расстояний![]()
Горизонтальный угол
![]()
Вопрос №6
Прямой аналитический расчет координат места судна
Для омс необходимо измерить ,как минимум, два нп, и зная выражение нф, записать систему уравнений ни.
пример: на судне
можем измерить два нп (расстояния) DA и
DB до ориентиров A (xA,yA) и B(xB,yB). Имеем
систему уравнений навигационных функций:
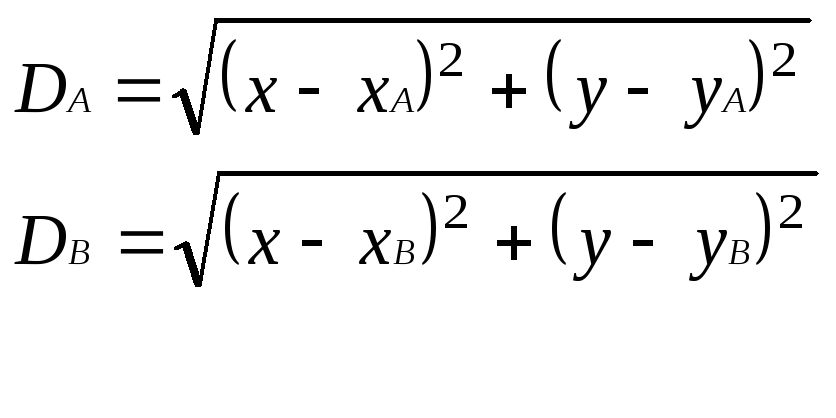 (1.37)
(1.37)
Теперь необходимо решить систему (1.38) относительно неизвестных координат (x,y) , которые и являются координатами места судна.
Рассмотрим задачу определение места по двум пеленгам на плоскости.
Система уравнений с рис. 1.17 будет иметь вид:
 (1.39)
(1.39)
где х1 ,х2, y1, y2 – координаты навигационных ориентиров.
Обозначив tgП1 через Т1,а tgП2 через Т1 ,х0 =х, y0 =y, запишем алгоритм решения системы:
-
Т1(х1–х0)-y1 = Т2(х1–х0)–y2;
-
х0=(Т2х2-Т1х1+y1–y2)/(Т2-Т1);
-
y0=(Т1Т2(х2-х1)+Т2y1–Т1y1)/(Т2-Т1);
-
пусть П1=30, П2=82, тогда обсервованные прямоугольные координаты рассчитаем так:
-
х0=(tg(82)*3-tg(30)*8+5-9)/(tg(82)-tg(30)=1.95 мили
-
y0=(tg(30)*tg(82)*(3-8)+(tg(82) *5-(tg(30)*9)/(tg(82)-tg(30)=1.50 мили.