

-
Погрешности измерения нп в снс. Основные причины возникновения погрешностей.
Для ОМС необходимо знать координаты спутника в момент наблюдений. Исходными величинами для расчетов являются кеплеровские параметры орбиты.
Неравномерность параметров орбит возникает из-за:
-
Несимметричность распределения массы Земли, которая приводит к смещению восходящего узла при i<90° к W, при 180°<i<90° к E (прецессия орбиты).
-
Сопротивление атмосферы среды.
-
Влияние Солнца, Луны и планет.
-
Световое давление.
Основные источники погрешностей:
-
Погрешности часов спутника
-
Ионосферные погрешности (систематическая погрешность)
-
Тропосферные погрешности
-
Релятивистский эффект
-
Вращение Земли
-
Погрешность часов приемника
-
Влияние многолучевого отражения
-
Трассы полета спутников. Зона радиовидимости.
О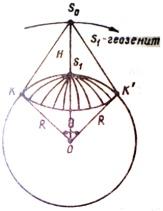 рбитой
спутника называется траектория его
движения относительно центра Земли.
Трасса спутника – линия, образованная
пересечением плоскости орбиты с
поверхностью Земли.
рбитой
спутника называется траектория его
движения относительно центра Земли.
Трасса спутника – линия, образованная
пересечением плоскости орбиты с
поверхностью Земли.
Малый круг, в пределах которого могут приниматься радиосигналы спутника S0, называется зоной радиовидимости. сферический диаметр Θ этой зоны определяется по формуле
Угол D – сферический радиус
Для надежности приема сигналов необходимо,
чтобы ИСЗ имели высоту не м енее
10° над горизонтом. Т.к. при малой высоте
спутника будут наблюдаться высокий
уровень помех и большое затухание
радиоволн в атмосфере
енее
10° над горизонтом. Т.к. при малой высоте
спутника будут наблюдаться высокий
уровень помех и большое затухание
радиоволн в атмосфере
-
Возмущение орбит. Прогнозирование положения спутников на орбите.
Земля неоднородна и не шарообразна, на ИСЗ воздействует «солнечный ветер» и т.п. Эти возмущающие факторы (хотя и на 5-6 порядков меньше, чем центральное гравитационное поле) приводят шесть параметров (t). I(t), (t), a(t), b(t), tП(t) медленно меняющимися во времени. Причем вводят так называемые оскулирующие параметры, определяемые на некоторый интервал времени в предположении отсутствия возмущений. В системе GPS изменения параметров учитываются в виде аддитивных поправок, имеющих вид линейной комбинации синуса и косинуса удвоенного (также исправленного) аргумента широты.
Орбиты разбивают на множество отрезков, которые могут быть заменены гладкой эллиптической орбитой, параметры которой доподлинно известны. По эфемеридам орбиты мы можем определить его положение. Спутник передает на Землю свое местоположение. На Земле ставятся станции слежения для сбора информации в ЦУП. После вычисления уточненной орбиты, эти данные передаются на спутник.
-
Способы передачи дифпоправок.
И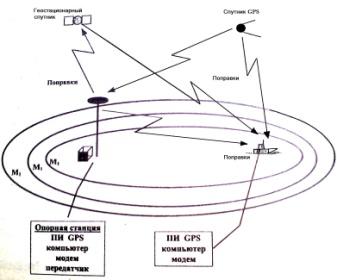 дея
дифпоправок заключается в том, что
приемная аппаратура спутниковых систем
устанавливается на контрольных станциях,
координаты которых определены геодезически
и очень точно. Т.о. на станции появляется
возможность вычислить дифпоправки к
координатам, или к радио НП. Поправки
радиотехническими методами передаются
в приемную судовую аппаратуру для
получения более точных координат. Каналы
связи могут быть наземные, например в
частотном диапазоне радиомаяков, или
через геостационарные спутники ИНМАРСАТ.
В сигналах опорных станций транслируются
16 видов данных, но непосредственно для
навигации используется: идентификатор
опорной станции, расписание передачи
информации, объем передаваемой информации,
техническое состояние опорной станции.
Затем передаются поправки к псевдодальностям
по каждому спутнику отдельно в фазовых
циклах по форме:
дея
дифпоправок заключается в том, что
приемная аппаратура спутниковых систем
устанавливается на контрольных станциях,
координаты которых определены геодезически
и очень точно. Т.о. на станции появляется
возможность вычислить дифпоправки к
координатам, или к радио НП. Поправки
радиотехническими методами передаются
в приемную судовую аппаратуру для
получения более точных координат. Каналы
связи могут быть наземные, например в
частотном диапазоне радиомаяков, или
через геостационарные спутники ИНМАРСАТ.
В сигналах опорных станций транслируются
16 видов данных, но непосредственно для
навигации используется: идентификатор
опорной станции, расписание передачи
информации, объем передаваемой информации,
техническое состояние опорной станции.
Затем передаются поправки к псевдодальностям
по каждому спутнику отдельно в фазовых
циклах по форме:
![]() ,
где
,
где ![]() - поправка к псевдодальности в момент
t0
- поправка к псевдодальности в момент
t0![]() – приращение поправки за время
– приращение поправки за время ![]()
Далее следуют: идентификатор спутника, техническое состояние спутника, возраст информации, предполагаемая погрешность НП.