

Министерство образования и науки Российской Федерации
Алтайский государственный технический университет
им. И.И. Ползунова
Кафедра теоретической механики и механики машин
Курсовой проект защищен с оценкой
___________________________
Руководитель
проекта___________доцент В.А.Быков
УДК 666.777.97дителя)
Исследование механизмов брикетировочного пресса пояснительная записка к курсовому проекту
(по дисциплине Теория механизмов и машин)
КП 240801 25 005 ПЗ
Проект выполнил
студент гр. МАХП-01 Шишкин МС
Нормоконтролер доцент В.А. Быков
Барнаул 2013
Задание
 Рычажный
механизм преобразует вращательное
движение кривошипа 1, в поступательное
движение ползуна 5.
Рычажный
механизм преобразует вращательное
движение кривошипа 1, в поступательное
движение ползуна 5.
Кривошип приводится в движение электродвигателем через планетарный редуктор и зубчатую передачу, состоящую из колёс aиb.
При проектировании и исследовании механизмов брикетировочного пресса считать известными параметры, приведённые в таблице 1.
Центр масс шатуна 4 лежит в середине его длины.
За первое следует принять положение кривошипа, в котором ползун 5 находится в начале рабочего хода. Направление вращения кривошипа выбрать, исходя из условия
φр-х˃φх-х.
Значение усилия в любом положении во время рабочего хода ползуна определяется по зависимости:
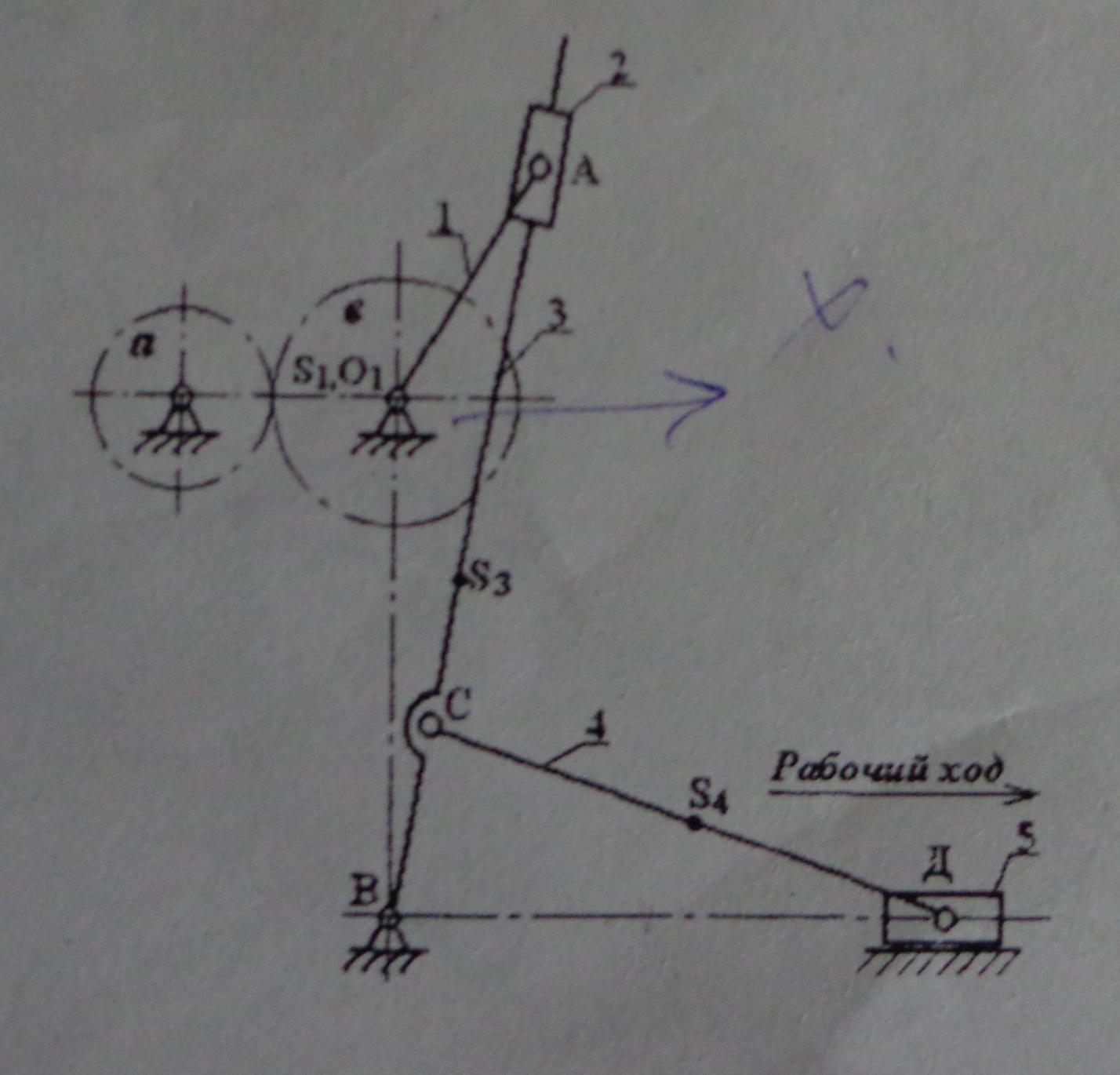

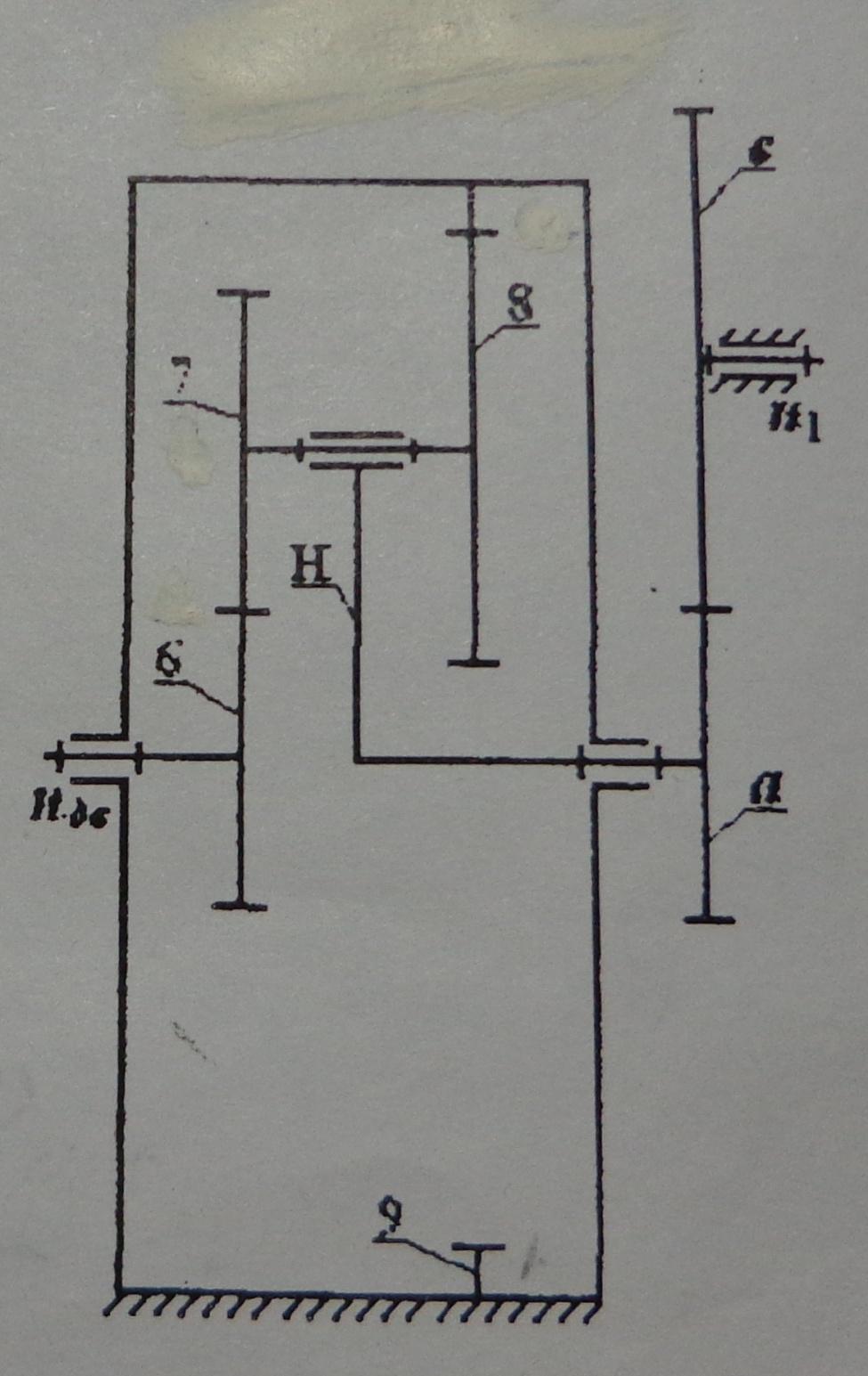
Таблица 1
|
Наименование параметра |
Размерность |
Значение | ||
|
Коэффициент изменения средней скорости, KV |
- |
2,0 | ||
|
lOB |
м |
0,1 | ||
|
lBC |
0,09 | |||
|
lBS3 |
0,11 | |||
|
lCD |
0,18 | |||
|
Частота вращения кривошипа, n |
об/мин |
160 | ||
|
Массы звеньев |
m1 |
кг |
6 | |
|
m2 |
12 | |||
|
m3 |
10 | |||
|
m4 |
30 | |||
|
Моменты инерции звеньев |
IS1 |
кг·м2 |
0,5·m1·l2OA | |
|
IS3 |
0,3·m3·l2BC | |||
|
IS4 |
0,1·m4·l2CD | |||
|
Сила сопротивления при холостом ходе, PX-X |
H |
100 | ||
|
Номер положения при силовом расчёте |
- |
2 | ||
|
Числа зубьев колёс |
Za |
- |
16 | |
|
Zb |
25 | |||
|
Модуль колёс aиbи планетарного механизма |
мм |
4 | ||
|
Передаточное отношение U6H |
- |
3,2 | ||
|
Максимальное значение силы прессования, Pmax |
H |
1000 | ||
|
Приведённый к кривошипу момент инерции масс зубчатого механизма и ротора электродвигателя, I |
кг·м2 |
0,5 | ||
|
Коэффициент неравномерности, δ |
- |
0,05 | ||

Оглавление
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
|
|
|