

3.4. Определение динамических характеристик
МАГНИТНЫХ МАТЕРИАЛОВ
Одним из удобных способов определения динамических характеристик является осциллографический. Схема установки приведена на рис. 3.9/ При прохождении переменного тока по первичной намагничивающей катушке L J в измерительной катушке L2 наводится ЭДС, мгновенное значение которой согласно закону электромагнитной индукции
e{t) = -w2s2dB/dt.
Таким образом, для того чтобы напряжение, приложенное к вертикальным пластинам осциллографа, было пропорционально магнитной индукции в сердечнике, необходимо ЭДС проинтегрировать по времени. В качестве интегрирующей используется ЛС-цепочка, состоящая иэ R2 и С. Выходное напряжение интегрирующего контура
1 1 w2s2B
С/, = —Sidt « J e(t)dt = . (3.17)
с r2c r2c
Как видно иэ рис. 3.9, последовательно с намагничивающей обмоткой L1 включен резистор R1, падение Напряжения на котором после усиления подается на горизонтально отклоняющие пластины осциллографа. Это напряжение пропорционально намагничивающему току U2 = IR1, а следовательно, и магнитному полю Н:
U2 = RllH/wt. (3.18)
Рис.
3.9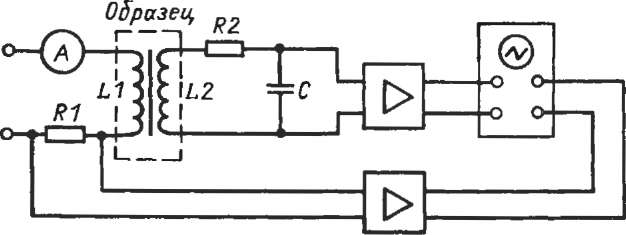
Это напряжение после усиления подается на вертикально отклоняющие пластины.
В формулах (3.17) и (3.18) wlf w2 — число витков катушек L1 и L2; I — средняя длина витка катушки £7; s2 — площадь витка катушки L2. Итак, на вертикальные пластины осциллографа подается напряжение, мгновенное значение которого пропорционально индукции в сердечнике, а на горизонтальные — напряжение, мгновенное значение которого пропорционально напряженности поля. На экране осциллографа видна динамическая петля гистерезиса, по которой можно определить интересующие наблюдателя параметры.
Глава четвертая
ИЗМЕРЕНИЕ НЕЗЛЕКТРИЧЕСКИХ ВЕЛИЧИН
4.1. Структурные схемы приборов для
ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Приборы для измерения неэлектрических величин или отдельные их преобразователи в рабочих условиях подвергаются воздействию различных неблагоприятных условий, ухудшающих их точность. Одним из методов уменьшения погрешности является структурный метод. По этому методу прибор строится из преобразователей, подверженных действию влияющих величин, но его структурная схема выбирается такой, чтобы частные погрешности отдельных преобразователей взаимно компенсировались. Структурный метод позволяет построить "хороший" прибор, используя "плохие" преобразователи. Структурная схема прибора во многом определяет его свойства. Приборы, построенные по простым схемам, обычно дешевле и надежнее приборов, построенных по сложным схемам. Однако усложнение схемы приводит к прибору с лучшими метрологическими характеристиками: меньшей погрешности, меньшей инерционности и т.д.
4.1.1. Последовательное соединение преобразователей
Последовательной схемой соединения преобразователей называется такая, при которой входной величиной каждого последующего преобразователя служит выходная величина предыдущего. Входной величиной первого преобразователя является измеряемая величина. Отдельные преобразователи могут иметь более сложную структуру.
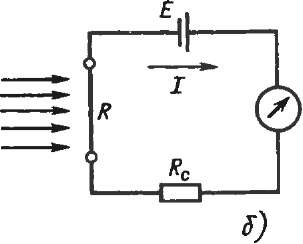
Примером схемы с последовательным соединением преобразователей является структурная схема термоанемометра (прибора для измерения скорости газов). Датчик (рис. 4.1, а) представляет собой платиновую проволоку I с сопротивлением R, припаянную к манганиновым стержням 2, которые смонтированы на ручке 3. Проволока с помощью проводов 4 включена в электрическую цепь, показанную на
V |
1 |
|
г |
И |
31 |
|
|
|
4>
рис. 4.1, б, и нагревается током /, идущим от источника Е. При протекании тока I по рамке измерительного механизма его стрелка откло- - няется. Символом Rc обозначено суммарное сопротивление проводов, измерительного механизма и источника питания.
В рассмотренном термоанемометре можно выделить следующие элементарные преобразователи, включенные последовательно (рис. 4.1, в): 1 — нагретая проволока, преобразующая скорость v воздуха в изменение температуры t; 2 — та же проволока, выполняющая функцию термометра сопротивления и преобразующая изменение температуры в изменение сопротивления/?; 3 — электрическая цепь, преобразующая изменение сопротивления R в изменение тока /; 4 — измерительный механизм, преобразующий изменение тока 1 в изменение отклонения стрелки или отсчета прибора \р.
(4.1)
t = /(v).
Функция преобразования второго преобразователя является зависимостью сопротивления платиновой проволоки R от температуры- t и выражается уравнением
R = Л0(1 + at),
где R0 — ее сопротивление при 0 ° С; а - температурный коэффициент сопротивления.
Функция преобразования третьего преобразователя — зависимость тока I в цепи от значения сопротивления R:
1 = E\(R + Rc). (4.3)
функция преобразования четвертого преобразователя — зависимость отклонения стрелки магнитоэлектрического механизма у от проходящего через него тока /, причем
ч> = V' <4-4)
где S — чувствительность механизма.
Функция преобразования прибора получается путем последовательной подстановки функций преобразования элементарных преобразователей (4.3), (4.2), (4.1) в (4.4):
* = SJ = SmE'(R + RJ = SuEHR с + RoV * at)] =
= SME/(Rc + R0[l + af(v)]). (4.5)
Выражение (4.5) определяет зависимость отклонения стрелки прибора от измеряемой скорости воздушного потока. Оно показывает также влияние конструктивных параметров (S Е, Rq, R0, а) на функцию преобразования и может быть использовано при проектировании.
Определим зависимость чувствительности прибора от чувствитель- ностей отдельных преобразователей Sь S2, S3 и S4. Согласно определению чувствительности
= J - - ,ехР 12
Щ, = LI212, (2.60) 64
SPi + = <ft> + (2.80) 95
тпжтп_ о = т„_ {жтп _2) =••■ 111
Hi = C<bHa6Hll2Vow^- (315> 152
ч> = V' <4-4) 158
у 1 = Уш + 4у1 160
= S3(y2max — yimin) = Уътах — Узтт • (4-16) 162
*ос=/00- (4.39) 169
У =Г1(хос) ^ Г1^), (4-40) 169
\f I if и и*ых 212
I=kUcow, (4.113) 241
m_TL 283
I = ArV(p, - РгУ, (4-163) 308
л яг, ,-Л 356
= f(a 1, а2, ..., а 366
u(t) = t/mOsin[0(O], (5.5) 397
Fj (xi, х2, хт, у 1, у2, Уп) = 0; 442
рг (Xi, Х2 Хт, у,, у2, ..., Уи) = 0; 442
! = (р — 7-, 514
(4.2)
Рассмотрим зависимость погрешности прибора с последовательным соединением преобразователей от погрешностей элементарных преобразователей. Для простоты положим, что прибор состоит из трех преобразователей (рис. 4.2). Считаем, что каждый отдельно взятый преобразователь имеет погрешность. Его выходная величина может быть представлена в виде с^ммы
у = ун + Ау , (4.10)
где ун — часть выходного сигнала, определяемая входной величиной и номинальной функцией преобразования; Ау — абсолютная погрешность, приведенная к выходу преобразователя.
АУз
Уз
&Уг
1
о
I
,
Л
У1
Уг
О
Рис.
4.2
(4.11)
(4.12)
(4.13)
у 1 = Уш + 4у1
воздействует на вход преобразователя 2. Выходная величина преобразователя 2 при этом будет равна
У1 = Угн + SiAyx + Ау2,
где S2 — чувствительность преобразователя 2; Ау2 — его погрешность. Выходная величина преобразователя 2 воздействует на вход преобразователя 3. Выходная величина преобразователя 3 при этом станет равной
У з = Узн + GS^Ayi + АЫ^з + АУз = = Узн + S2S3Ayt + S3Ay2 + Ау3 ,
где Sз — чувствительность преобразователя 3\ Ау3 — его погрешность.
(4.14)
Ду = У ~ У„ = S2S3Ay1 + S3Ay2 + Ду3.
Из 4.14 следует, что при последовательном соединении преобразователей погрешность прибора равна сумме пересчитанных к выходу погрешностей всех входящих в него преобразователей.
Аналогично можно показать, что погрешность по входу определяется выражением
Ах = Ахх + (1 /Si)Ax2 + (l/S^AXi, (4.15)
где , Ах2 , Ах3 — погрешности преобразователей 1—3 по входу.
Рассмотрим приведенную погрешность прибора, состоящего из преобразователей с пропорциональной функцией преобразования. Диапазон изменения выходной величины такого прибора
Углах ~~ У min = S(Xmax ~ Xmin) = ^з Oi max ~ Угтт) =
= S3(y2max — yimin) = Уътах — Узтт • (4-16)
Подставив выражения (4.14) и (4.16) в формулу приведенной погрешности (1.22), получим
Ь=7У1+ УУ2 + Ууэ ■ <4-17)
Таким образом, при последовательном соединении преобразователей, имеющих пропорциональные функции преобразования, приведенная погрешность прибора равна сумме приведенных погрешностей преобразователей, его составляющих.
По полученным выражениям можно определить погрешность прибора, если известны погрешности преобразователей, его составляющих, например, если погрешности систематические.
Если же погрешности случайные, то их значения обычно неизвестны, но часто известны вероятностные параметры точности: среднеквадрати- ческая погрешность, предельные погрешности и т.д.
Для схемы рис. 4.2 абсолютное значение среднеквадратической погрешности при независимости частных погрешностей
о = Vol + olSl + diSlSl , (4.18)
где (Т| 2, з — абсолютное значение среднеквадратической погрешности соответствующих преобразователей.
Приведенная среднеквадратическая погрешность при пропорциональной функции преобразования определяется выражением
°пР = + a*p2 + »£рз , (4.19)
где anp j 2 з — приведенные среднеквадратические погрешности соответствующих преобразователей.
В (4.18) и (4.19) среднеквадратические абсолютные или среднеквад- ратические приведенные погрешности элементарных преобразователей геометрически складываются.
При нормальных законах распределения погрешностей элементарных преобразователей по аналогичным формулам могут определяться и предельные погрешности прибора при заданных доверительных вероятностях.
Преимуществом прибора с последовательным соединением преобразователей является его простота. Недостатком — довольно большая погрешность.