

25. Условие минимума среднеквадратичной ошибки.
Задача оптимизации формируется следующим образом.
Имеется система автоматического управления заданной структуры. Необходимо так выбрать параметры этой системы, чтобы получить минимум среднеквадратичной ошибки при заданных статистических характеристиках полезного сигнала и помехи.
Обозначим
 –
выходной сигнал системы, оптимальной
по критерию минимума среднеквадратичной
ошибки.
–
выходной сигнал системы, оптимальной
по критерию минимума среднеквадратичной
ошибки.
Если – выходной сигнал любой другой системы данного класса (неоптимальной), то
 , (4.5)
, (4.5)
где
 –
требуемый выходной сигнал (аргумент
для простоты записи опущен).
–
требуемый выходной сигнал (аргумент
для простоты записи опущен).
Добавляя
 в
скобки правой части неравенства (4.5),
получим
в
скобки правой части неравенства (4.5),
получим
 . (4.6)
. (4.6)
Следовательно, из (4.5) и (4.6):
 , (4.7)
, (4.7)
где
 . (4.7)
. (4.7)
Из равенства (4.7) следует, что для выполнения неравенства (4.5) необходимо, чтобы
 (4.8)
(4.8)
 . (4.9)
. (4.9)
Так как первое слагаемое в правой части равенства (4.7) всегда положительно, то для выполнения требования (4.8) достаточно приравнять нулю второе слагаемое равенства (4.7):
 . (4.10)
. (4.10)
Требование (4.9) по
физическому смыслу говорит о том, что
величина среднеквадратичной ошибки
оптимальной системы всегда конечна.
Формально это значит, что в состав
сигнала
 не
должен входить белый шум.
не
должен входить белый шум.
Равенство (4.10) вместе с ограничением по виду выходного сигнала оптимальной системы является общим условием минимума среднеквадратичной ошибки.
26. Уравнение оптимальной линейной системы.
Получим уравнение, определяющее оптимальную линейную систему.
Примем за динамическую
характеристику линейной оптимальной
системы весовую функцию
 .
.
Выходной сигнал оптимальной системы определяется формулой
 (4.11)
(4.11)
где
 –
входной сигнал системы;
–
входной сигнал системы;
 –
время наблюдения входного сигнала
(здесь и далее полагается
–
время наблюдения входного сигнала
(здесь и далее полагается
 ).
).
Весовую функцию произвольной линейной системы представим в виде
 . (4.12)
. (4.12)
Тогда сигнал на выходе произвольной системы будет равен
 . (4.13)
. (4.13)
Критерием оптимальности данной системы будем считать минимум среднеквадратичной ошибки.
В соответствии с полученным условием (4.10) с учётом (4.13) запишем
 . (4.14)
. (4.14)
После умножения
выражения в круглых скобках на
 и выполнения операции математического
ожидания получаем
и выполнения операции математического
ожидания получаем
,
 (4.15)
(4.15)
где обозначено
 . (4.16)
. (4.16)
В общем случае,
когда
 и функция
и функция
 ,
равенство (4.15) будет удовлетворяться
при условии, что равно нулю выражение
в скобках, т.е.
,
равенство (4.15) будет удовлетворяться
при условии, что равно нулю выражение
в скобках, т.е.
 . (4.17)
. (4.17)
Выражение (4.17) и есть уравнение, определяющее оптимальную линейную систему. Оно называется интегральным уравнением Винера-Хонфа и получено из условия (4.10).
Определение весовой функции оптимальной линейной системы
Предполагается,
что мы умеем найти
 – весовую функцию системы, преобразующую
данную случайную функцию X(t)
в белый шум V(t).
– весовую функцию системы, преобразующую
данную случайную функцию X(t)
в белый шум V(t).
При этом известна
весовая функция обратной системы
 ,
формирующей X(t)
из белого шума V(t),
т.е.
,
формирующей X(t)
из белого шума V(t),
т.е.
 (4.28)
(4.28)
Обозначим весовую
функцию оптимальной линейной системы
для белого шума V(t)
на входе
через
 .
.
Искомая оптимальная система представляет собой последовательное соединение линейных систем с весовыми функциями и (рис 4.2).
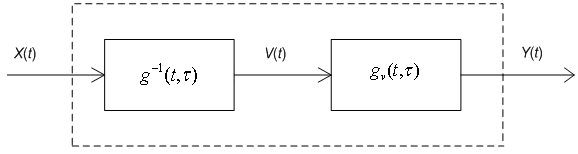
Рис. 4.2. Оптимальная система
Ранее была получена формула для .
 , (4.29)
, (4.29)
где
 –
интенсивность белого шума V(t).
–
интенсивность белого шума V(t).
По формуле для последовательного соединения систем, описываемых весовыми функциями, имеем
В данном случае
 –
переменная интегрирования
–
переменная интегрирования
 ,
,
 –
момент действия на систему -функции
(входного сигнала).
–
момент действия на систему -функции
(входного сигнала).
Существуют аналитические методы решения задачи, когда функция X(t) стационарна и имеет дробно-рациональную спектральную плотность.