2 . Способы построения фазовых портретов нелинейных систем.
Думаю метод и способ это одно и то же, так что смотреть билет №7 задание №2.
Экзаменационный билет № 11
Методы настройки промышленных пид-регуляторов.
Существует несколько вариантов настройки ПИД-регуляторов.
А) Самый простой и понятный – Метод Циглера-Никольса. Суть данного метода состоит в следующем:
В функционирующей системе выключаются интегральная и дифференциальная составляющие ПИД-регулятора (
 ,
, ),
то есть система переводится в П-закон
регулирования;
),
то есть система переводится в П-закон
регулирования;Путем последовательного увеличения
 с одновременной подачей небольшого
скачкообразного сигнала задания
добиваются возникновения в системе
незатухающих колебаний с периодом
с одновременной подачей небольшого
скачкообразного сигнала задания
добиваются возникновения в системе
незатухающих колебаний с периодом
 .
Это соответствует выведению системы
на границу колебательной устойчивости.
При возникновении данного режима работы
фиксируются значения критического
коэффициента усиления регулятора
.
Это соответствует выведению системы
на границу колебательной устойчивости.
При возникновении данного режима работы
фиксируются значения критического
коэффициента усиления регулятора
 и периода критических колебаний в
системе
.
При появлении критических колебаний
ни одна переменная системы не должна
выходить на уровень ограничения;
и периода критических колебаний в
системе
.
При появлении критических колебаний
ни одна переменная системы не должна
выходить на уровень ограничения;Далее рассчитываются и устанавливаются параметры ПИД-регулятора по следующим формулам:
 ,
,
 ,
,
 .
.
Б) Метод автоматической настройки в пакете Simulink. Для этого нужно выбрать параметры ПИД-регулятора самому или рассчитать их. Руководствуясь этим нужно задать форму переходного процесса в программе и смоделировать параметры ПИД-а.
В) Метод настройки ПИД-регулятора, основанный на реакции системы на ступенчатое воздействие.
П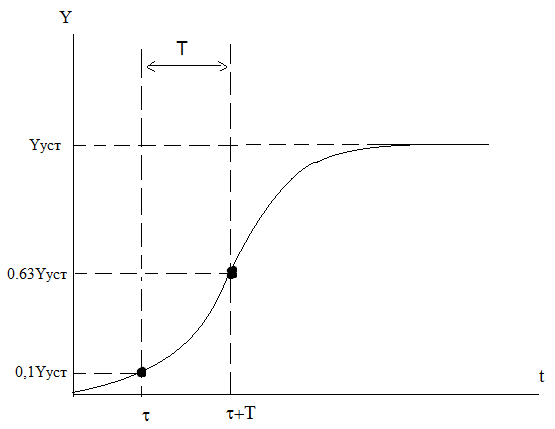 одаём
на систему ступенчатое воздействие и
фиксируем переходный процесс.
одаём
на систему ступенчатое воздействие и
фиксируем переходный процесс.



Где

Оценка устойчивости систем с интервально определенными параметрами.
Исходные допущения:
Характеристический полином с интервально определенными параметрами:
 (1)
(1)
Для
всех
 :
:
 (2)
(2)
Критерий Харитонова. Теорема 1.
Для
того чтобы
 необходимо и достаточно, чтобы
необходимо и достаточно, чтобы
 .
.
Где
 -
множество полиномов вида (1). Все его
кони лежат в левой половине комплексной
плоскости.
-
множество полиномов вида (1). Все его
кони лежат в левой половине комплексной
плоскости.
 -семейство
всех полиномов (1) удовлетворяющих (2).
-семейство
всех полиномов (1) удовлетворяющих (2).
 -
семейство тех полиномов из
у которых
-
семейство тех полиномов из
у которых

 или
или
 при
при
 .
Т.о. в множестве
будет
.
Т.о. в множестве
будет
 - полиномов.
- полиномов.
Критерий Харитонова. Теорема 2.
Д
 ля
того чтобы
необходимо и достаточно, чтобы
принадлежало 4 полинома из
со след. наборами корней:
ля
того чтобы
необходимо и достаточно, чтобы
принадлежало 4 полинома из
со след. наборами корней:
Экзаменационный билет № 12
Д искретные сау, их разновидности и используемый для их анализа и синтеза математический аппарат.
2 . Введение в закон управления релейных сар воздействия по производной от ошибки регулирования.
Д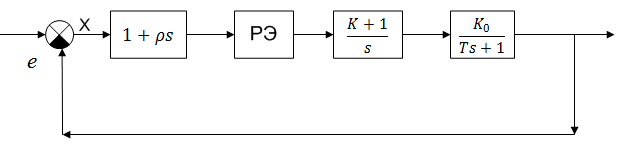 ля
улучшения динамики систем, в П-систему
вводят производную от ошибки, тем самым
реализуется ПД-алгоритм формирования
входного сигнала.
ля
улучшения динамики систем, в П-систему
вводят производную от ошибки, тем самым
реализуется ПД-алгоритм формирования
входного сигнала.