2. Модальный синтез систем автоматического управления.
Этот синтез применяется для придания системам желаемых динамических свойств.
 ;
Si
– корни
характеристического уравнения системы.
;
Si
– корни
характеристического уравнения системы.
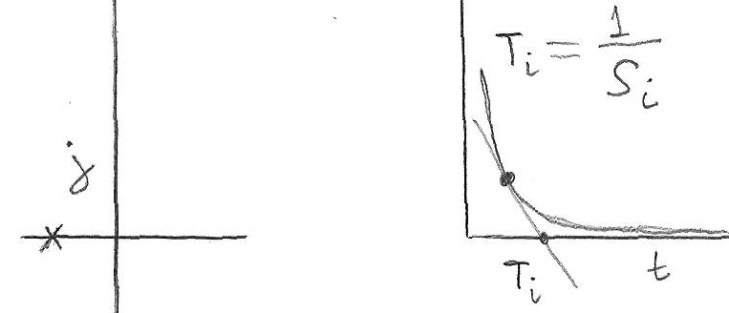
Суть модального метода: Подбор значения корней характеристического ур-я системы, обеспечивающих требуемую динамику этой системы, а в последующем, после выбора этих Si, задача сводится к подбору подстраиваемых параметров системы, таких, что хар-ое ур-е этой системы будет иметь корни равные выбранным нами.

 – моды системы.
Синтезируемая система :
– моды системы.
Синтезируемая система :
 , его хар-кое ур-е A(s)=0,
и полюса передаточной функции системы:
S(i).
B(s)=0
– нули функции. Модальный синтез
ориентирован на подбор полюсов, в этом
смысле синтез не полноценный, т.к. не
учитывается B(s)=0.Полюса
системы выбираются из некоторой области,
эта область чаще всего задается в виде
трапеции.
, его хар-кое ур-е A(s)=0,
и полюса передаточной функции системы:
S(i).
B(s)=0
– нули функции. Модальный синтез
ориентирован на подбор полюсов, в этом
смысле синтез не полноценный, т.к. не
учитывается B(s)=0.Полюса
системы выбираются из некоторой области,
эта область чаще всего задается в виде
трапеции.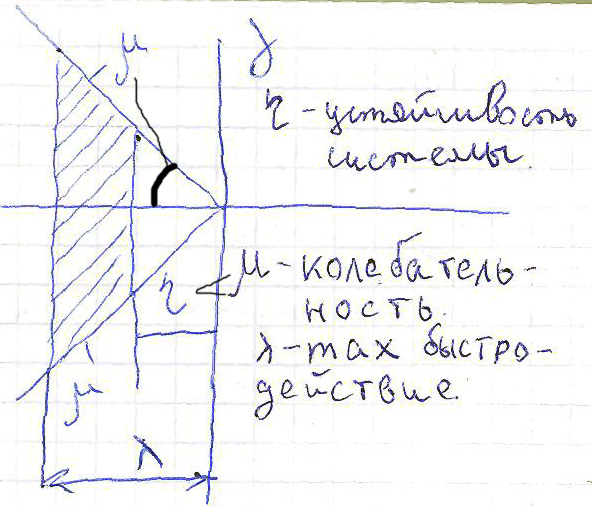
При модальном синтезе выполняются действия:
1. Для проектируемой системы определяют тип корректирующих устройств или регуляторов, и устанавливают те параметры, которые нужно подобрать(настроить).

2. Составляем хар-е уравнение систематизируемой системы, записывая в нем символьно настраиваемые параметры и подставляем в него численные значения остальных параметров системы
3. Подбираем корни хар-го ур-я для синтезируемой системы исходя из желаемых её динамических свойств, для этого определяем область динамических корней и выбираем конкретные значения корней: S1, S2, S3,…,Sn.
4. Составляем хар-ое ур-е для синтезируемой системы с выбранными корнями
 (1)
(1)
 (2)
(2)
5.
Представляем исходное хар-ое ур-е
системы, сформулированное в пункте 2 в
том же виде
 (3)
(3)
 -
коэффициент при Si,
который может включать в себя один или
несколько подстраиваемых
-
коэффициент при Si,
который может включать в себя один или
несколько подстраиваемых
![]() параметров
системы.
параметров
системы.
![]() .
.
Для того, чтобы обеспечить равенство корней хар-го ур-я синтезируемой системы выбранным корням, необходимо иметь одинаковые коэффициенты в ур-ях (2) и (3), следовательно, нужно составить систему уравнений (4):
Из этой системы уравнений
и определяем настраиваемые параметры
Причем
система уравнений (4) может быть
и не совместной.
 .
.
6. Проверяют при выбранных значениях настраиваемых параметров, будет ли синтезированная система обладать желаемыми точностными и динамическими свойствами. Динамические свойства определяют находя переходные функции по каждому из входных воздействий.
7. Если динамические свойства синтезированной системы удовлетворяют нас, то модельный синтез мы завершили, а если не удовлетворяют, то синтез должен быть повторен(с другими полюсами) или продолжить другим методом синтеза.
Билет 10
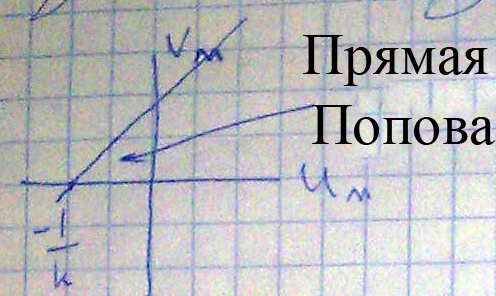
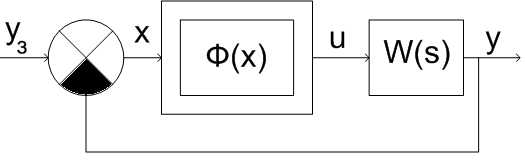
1. Критерий абсолютной устойчивости в. М. Попова.
Для устойчивого состояния равновесия нелинейной системы с однозначной
нелинейностью
Ф(x)
и устойчивой линейной частью с передаточной
функцией W(s)
достаточно
выполнения двух условий: 1). ReП(j )=Re[
(1+j
)=Re[
(1+j )W(j
)+
)W(j
)+ ]>0; 2).0<Ф(x)<kx.
]>0; 2).0<Ф(x)<kx.
Положение равновесия абсолютно устойчиво – это значит устойчиво в целом для целого семейства нелинейностей.

 ;
Условие 2 сводится тому, что наша
нелинейность должна лежать:
;
Условие 2 сводится тому, что наша
нелинейность должна лежать: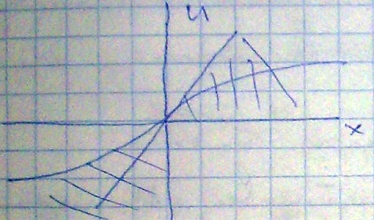

 (4)
(4)
Введем характеристику:
 (5)
(5)


Тогда (4) можно упростить:
 (7)
(7)
Тогда это по сути уравнение прямой:


 прямой
Попова.
прямой
Попова.