

Объемная задача теории упругости (solid)
Предполагается, что объемное тело заменено совокупностью объемных элементов, соединенных между собой лишь в узловых точках.
М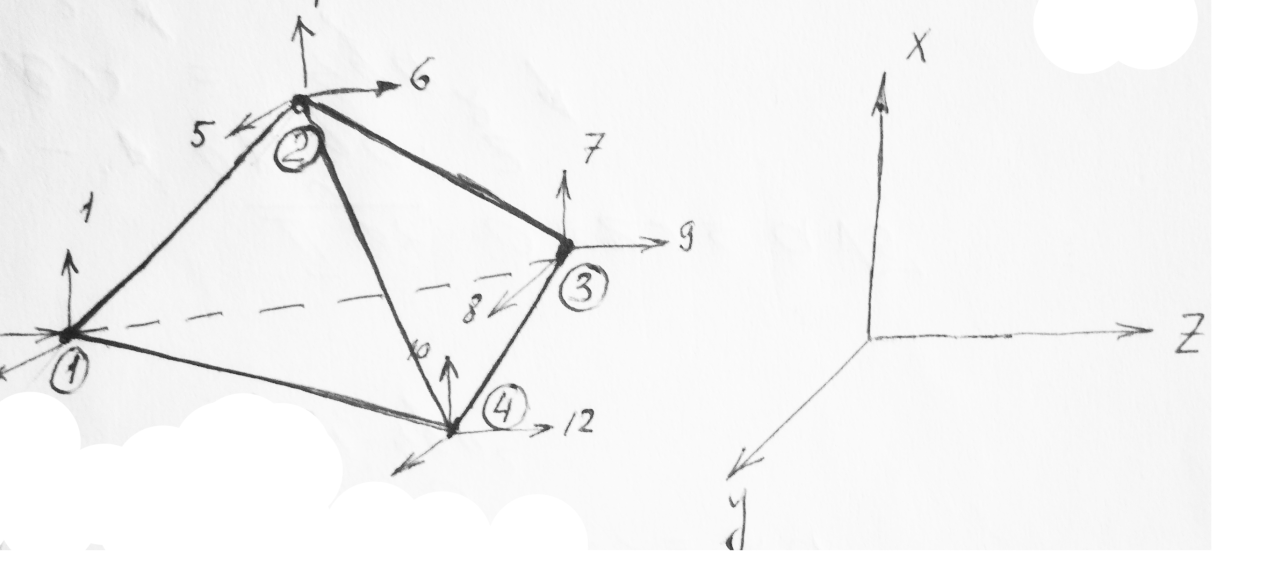 атрица
жесткости для тетраэдра
атрица
жесткости для тетраэдра
![]() -
узловые перемещения
-
узловые перемещения
![]() -
узловые усилия
-
узловые усилия
Так как 12 узловых перемещений, то вводим 12 коэффициентов α, что позволяет сделать предположение о линейной зависимости компонентов перемещений для произвольной точки от координат:
![]() (37)
(37)
Или в матричной форме
![]() (38)
(38)
где


1 х y z 0 0 0 0 0 0 0 0
![]() 0 0 0 0 1 x
y
z
0 0 0 0
(39)
0 0 0 0 1 x
y
z
0 0 0 0
(39)
0 0 0 0 0 0 0 0 1 x y z
![]()
Подстановка значений узловых координат дает
![]() (40)
(40)
В результате

![]() (41)
(41)
![]()
В развернутой
форме выражение для ![]() имеет вид
имеет вид
![]()
 (42)
(42)
Где
 -(43)
определитель матрицы
координат узлов, равных шести объемам
тетраидального элемента
-(43)
определитель матрицы
координат узлов, равных шести объемам
тетраидального элемента
|
|
|
|
Значения других постоянных определяются с помощью круговой перестановки узловых индексов 1, 2, 3, 4.
Аналогичное
выражение получаем для ![]() и
и ![]() .
Отличие будет состоять только в том,
что в выражения будут входить узловые
перемещения вдоль осей
.
Отличие будет состоять только в том,
что в выражения будут входить узловые
перемещения вдоль осей ![]() и
и ![]() соответственно (аналогично выражениям
(8)).
соответственно (аналогично выражениям
(8)).
Д
(44)
|
|
|
|
|
|
Найдем выражения для компонентов деформаций
![]() (45)
(45)
Где ![]()
![]() x
x
|
0 |
0 |
|
0 |
0 |
|
0 |
0 |
|
0 |
0 |
0 |
|
0 |
0 |
|
0 |
0 |
|
0 |
0 |
|
0 |
0 |
0 |
|
0 |
0 |
|
0 |
0 |
|
0 |
0 |
|
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
0 |
|
|
0 |
|
|
0 |
|
|
0 |
|
(46)
Напряженное состояние
![]() (47)
(47)
Где ![]()
Для изотропного материала
1 |
λ |
λ |
0 |
0 |
0 |
|
1 |
λ |
0 |
0 |
0 |
|
|
1 |
0 |
0 |
0 |
|
|
|
µ |
0 |
0 |
|
|
|
|
µ |
0 |
|
|
|
|
|
µ |
![]()
![]()
Где, E-модуль упругости, -коэффициент Пуассона
Проводя аналогичные рассуждения, как и по формулам (20)-(23), получаем матрицу жесткости для 4-х узлового объемного элемента
![]() (48)
(48)
К
Из матрицы [A] по зависимостям
Коши

![]() .
Или в развернутом виде, удобном для
исключения ошибок при реализации на
ЭВМ
.
Или в развернутом виде, удобном для
исключения ошибок при реализации на
ЭВМ

![]() (50)
(50)
Можно заранее подсчитать вручную
Осесимметричная объемная задача теории упругости.
Тело вращения разбивается на совокупность кольцевых КЭ с треугольным или четырехугольным поперечным сечением.
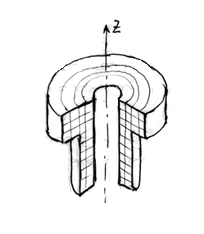
При осесимметричной форме тела и нагрузке напряженное и деформированное состояния будут функциями лишь координат r и z. Поэтому данная задача во многом аналогична плоской задаче теории упругости.
Матрица жесткости для кольцевого элемента с треугольным поперечным сечением.
КЭ представляет собой кольцо с треугольным поперечным сечением.
Так как шесть узловых перемещений, то это позволяет предложить закон изменения перемещений по плоскости поперечного сечения КЭ в виде

![]() - радиальное перемещение
- радиальное перемещение
![]() - осевое перемещение
(51)
- осевое перемещение
(51)
Или в матричной форме
![]() ,
(52)
,
(52)
Где ![]() ,
,
![]() (53)
(53)
![]()
Подстановка узловых координат в (51) дает
(54)
З десь
десь
![]() - узловые перемещения
- узловые перемещения
Радиальное осевое
перемещение перемещение
1 |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
![]()
(55)
Исключая с помощью
(54) вектор ![]() из (52), получаем
из (52), получаем
![]() ,
(56)
,
(56)
где ![]()
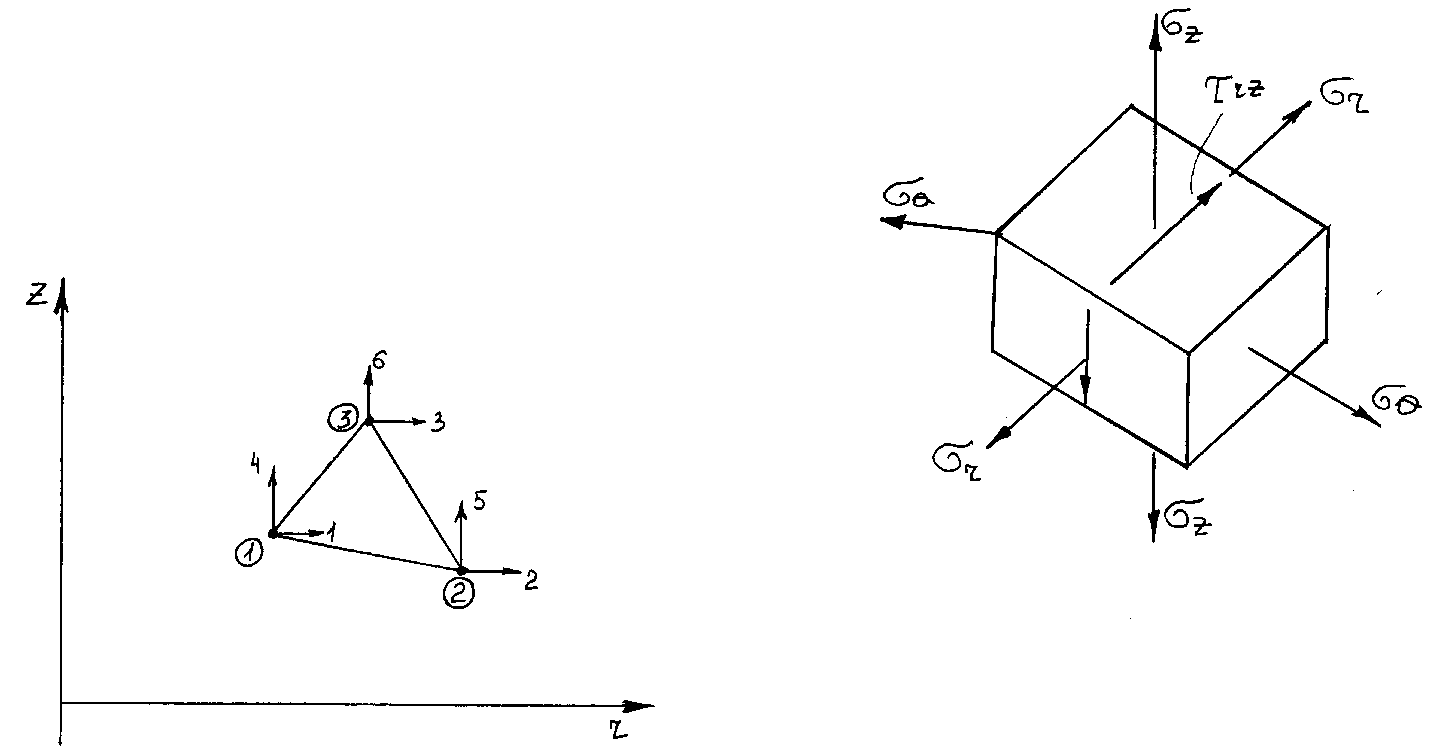
Зависимости Коши для осесимметричной задачи имеет вид

![]() - радиальная деформация
- радиальная деформация
![]() - тангенциальная деформация
- тангенциальная деформация
![]() - осевая деформация
(58)
- осевая деформация
(58)
![]() - угловая деформация
- угловая деформация
![]() - вектор деформаций
- вектор деформаций
Отсюда, с учетом (56) и (57)
, (59)
где ![]() (60)
(60)
|
1 |
0 |
0 |
0 |
0 |
|
1 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
![]()
- в результате дифференцирования (61)
Закон Гука для изотропного материала запишем в виде
![]() (62)
(62)
где ![]()
1 |
|
|
0 |
|
1 |
|
0 |
|
|
1 |
0 |
0 |
0 |
0 |
|

![]()
![]() ;
;
![]() ;
;
![]() (63)
(63)
или ![]() (64)
(64)
В результате имеем напряженное и деформированное состояния, выраженные через узловые перемещения.
Потенциальная энергия деформация КЭ

где ![]() (65)
(65)
или ![]() (66)
(66)
где ![]() (67)
(67)
F- площадь сечения кольцевого КЭ.
|
|
|
0 |
0 |
|
|
|
|
0 |
0 |
|
|
|
|
0 |
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
![]()
![]()
где
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()