

16. Статическая устойчивость сг
Статическая устойчивость СМ, работающей с параллельно с сетью – это способность сохранить синхронные вращения(n2=n1) при изменении внешнего вращающего или тормозного момента, приложенного к валу М.
Рассмотрим неявнополюсную М.
П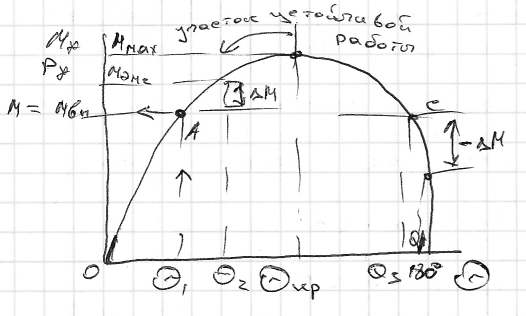 усть
СГ работает при некотором Мвн, передаваемого
ему от вала ПД. При этом ось полюсов
ротора будет сдвинута относительно оси
суммарного потока на угол
усть
СГ работает при некотором Мвн, передаваемого
ему от вала ПД. При этом ось полюсов
ротора будет сдвинута относительно оси
суммарного потока на угол
 .
.
Если
Мвн увеличивается, то ротор ген-ра
ускоряется →
↑
до
 .
В рез-те Мэм↑ он уравновешивает Мвн,
который возрос, т.е равновесие моментов
восстанавливается и М. продолжат работать
с синхронной частотой вращения.
.
В рез-те Мэм↑ он уравновешивает Мвн,
который возрос, т.е равновесие моментов
восстанавливается и М. продолжат работать
с синхронной частотой вращения.
При
Мвн↑→
↑,
а Мэм↓ на
 т.е
т.е
 - машина будет ускоряться.
- машина будет ускоряться.
Угол при этом продолжает возрастать. Это может привести к 2-м результатам:
1) Машина может перейти в точку устойчивой работы на последних положительных полуволнах угловой хар-ки.
2)Ротор по инерции проскакивает устойчивое положение. При этом М. выпадает из синхронизма, т.е. ротор начинает вращаться с частотой, отличной от частоты вращения поля. выпадение из синхронизма – аварийный режим.
Ток якоря I1 при этом периодически возрастает. При снижении нагрузки в сети:
↓→Мэм↑
Если
уменьшать нагрузку далее машина может
вернуться в область устойчивой работы.
Если машина работает в уст.режиме при
некотором
,
это сопровождается изменениями момента

 ;
-
стремится восстановить исходный угол
;
-
стремится восстановить исходный угол
-
синхронизирующий момент. Ему соотв.
синхр.мощность машины:

 -
удельный синхр.момент;
-
удельный синхр.момент;
 - уд.синхр.мощность
- уд.синхр.мощность
,
→max
при
 .
При
.
При
 равны 0.
равны 0.
Перегрузочная способность СМ
Перегрузочная способность СМ:
Кп=Ммакс/Мном=Рмакс/Рн
Для мощных генераторов Кп=1,6-1,7; СД: Кп=1,65
Для устойчивой работы индуцируемое сопротивление должно стрем. к мин.
Для этого надо увел. возд. зазор между ротором и статором. При увеличении возд. зазора надо увел МДС М., что ведет удорожанию М.
Т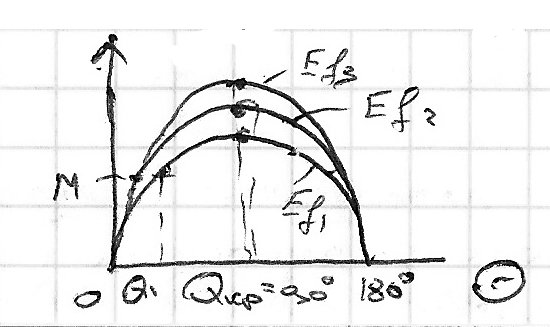 ут
идут на копромис: увеличивая возд. зазор,
применяют автом. рег-ие If.
ут
идут на копромис: увеличивая возд. зазор,
применяют автом. рег-ие If.
При увеличении If, увел. Ef, а след-но увел. F и увел. М.
Кп=Ммакс/М – устойчивость растет
Как правило СГ работают с перевозбуждением с соsφ=0,8
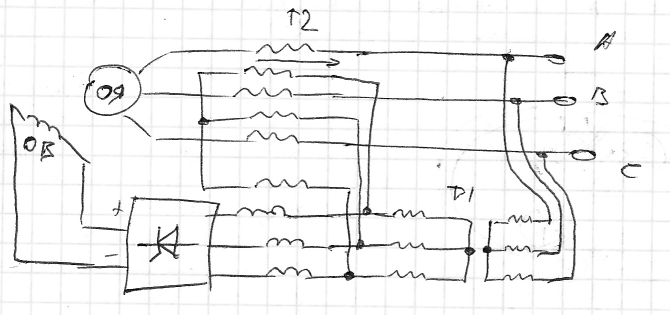
Для рег-ния возб-ния генераторы больш. мощности снабжают автомат. Регуляторами возбуждения (АРВ)
АРВ реагирует на изменение Uc:
dUc/dt; dI1/dt
Для поддержания СМ в синхронно режиме работы при снижении напр. сети применяют форсировку возбужденияю Она выполняется автоматически, она может выполняться РЗ, при этом замыкаются накоротко регулировочные реостаты в цепи возбуждения возбудителя либо надвозбудителя.
Эффективность форсировки определяется коеф. Кратности предельно установившегося напряжения возбудителя:
Kf=Ufмакс/Ufн; Kf=3-5
Также хар-ся скоростью возрастания: dUf/dt.
17. Синхронные двигатели
Е сли
к валу СМ, работающей параллельно с
сетью приложить внешний тормозной
момент, вал вместе с ротором замедляется,
при этом магн. Поле ротора поворачивается
и отстает от поля статора на угол θ.
сли
к валу СМ, работающей параллельно с
сетью приложить внешний тормозной
момент, вал вместе с ротором замедляется,
при этом магн. Поле ротора поворачивается
и отстает от поля статора на угол θ.
При
этом машина потребляет из сети Р и
возникает вращающий э.м. момент:
 ,
который компенсирует внешний тормозной
момент.
,
который компенсирует внешний тормозной
момент.
 .
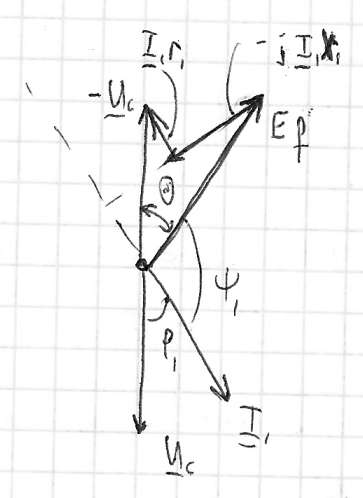
Векторные диаграммы СД могут быть
построены уравнением
.
Векторные диаграммы СД могут быть
построены уравнением

Для
неявнополюсной машины:

При переходе СМ из Г режима в Д установившаяся скорость вращения машины не меняется, а меняется знак угла θ на отрицательный – θ.
Э.м. мощность и момент определяется теми же соотношениями, что и для Г.
Д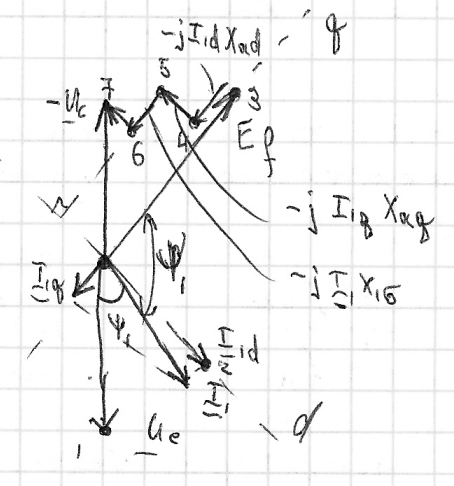
 ля
явнополюсной машины :
ля
явнополюсной машины :



Для неявнополюсной машины:
 ;
;
Участок устойчивой работы Д как и для Г, при 0< θ< θкр
Перегрузочная
способность СД:
Т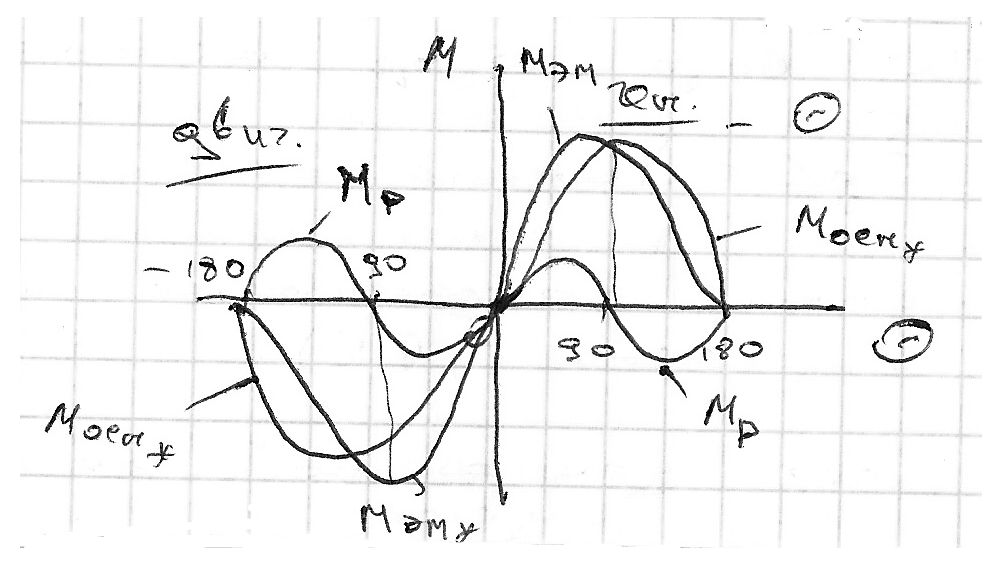 рехфазные
СД выпускаются на мощность от 20кВт до
нескольких десятков (без учета синхронных
микромащин) В зависимости от мощности
двигатели выполняются на напряжение
от 220В до 10кВ. При частотах от 100 до 1000
об.мин имеют явнополюсное исполнение.
При частотах 1500-3000 об.мин неявнополюсное.
рехфазные
СД выпускаются на мощность от 20кВт до
нескольких десятков (без учета синхронных
микромащин) В зависимости от мощности
двигатели выполняются на напряжение
от 220В до 10кВ. При частотах от 100 до 1000
об.мин имеют явнополюсное исполнение.
При частотах 1500-3000 об.мин неявнополюсное.
В СД воздушный зазор меньше, чем в Г. δдв<δген
Ширина полюсных наконечников Дв: 0.7τ. Ген: 0,9τ
У Д. сечение демпферной обмотки больше, т.к. она исполняется для пуска.
Для возбуждения СД используется или прямая электромашинная система с возбудителем на валу Д. или система самовозбуждения с полупроводниковыми выпрямителями.
Достоинства СД по сравнению с АД:
СД может работать с cosφ=1 (Ад не может, т.к. потребляет Q из сети), то позволяет повышать cosφ сети и уменьшить размеры двигателей по сравнению с АД, т.к. ток будет содержать только активную сост. И он будет меньше тока АД при той же мощности. СД работают с перевозбуждением и генерируют Q в сеть(cosφ=0,9 -рекоменд. Знач.) компенсирует недостаток Q.
Для СД:
 ;
Для АД:
;
Для АД:
 -
у СД меньшая чувствительность к
колебаниям напряжения.
-
у СД меньшая чувствительность к
колебаниям напряжения.СД имеет постоянную частоту вращения при изменении нагрузки.
Недостатки СД по сравнению с АД:
Более сложная конструкция –приводит к удорожанию Д и снижению надежности.
Сравнительная сложность пуска.
Сложности регулирования частоты вращения.
По совокупности достоинств и недостатков СД менее выгодные, чем АД при <100кВт, однако при более высоких мощностях важно иметь высокий косинус фи, а также уменьшать габариты машины- СД предпочтительнее.