

Моделирование физико-механических компонентов наносистем
Цель дисциплины - изучение математических моделей физико-механических компонентов наносистем, методов и алгоритмов, лежащих в основе моделирования наносистем.
Предметом изучения являются математические модели, используемые для инженерного анализа наносистем.
Задачи дисциплины – формирование знаний, умений и навыков по следующим направлениям деятельности:·
теоретическая подготовка по фундаментальным положениям теории построения моделей микро- и наносистем;·
методы моделирования физико-механических компонентов микро- и наносистем;
изучение различных моделей физико-механических компонентов микро- и наносистем;·
изучение различных алгоритмов расчета процессов в микро- и наносистемах;·
получение навыков выбора корректных моделей для физико-механических компонентов микро- и наносистем.
1. Введение в теорию моделирования физико-механических компонентов микро- и наносистем
Модель (ММ) – это условный образ исследуемого технического объекта (ИТО), конструируемый исследователем так, чтобы отобразить его характеристики (свойства, взаимосвязи, параметры), существенные для исследователя.
Модель может быть физическим объектом (ФО) (макет, стенд) или спецификацией – функциональная, поведенческая, структурная и др.
Моделирование – метод исследования процессов или явлений в ИТО на моделях (физических или математических).
Математические модели могут быт геометрическими, топологическими, динамическими, логическими и др.
Информационные модели – таблицы и диаграммы вида «сущность-отношение»
Функциональная математическая модель – это алгоритм вычисления вектора выходных параметров Y при заданных векторах параметров элементов X и внешних параметров Q.
Физическая модель – устройство или приспособление, воспроизводящее в том или ином масштабе ИТО при сохранении физического подобия процессов в ФО процессам в ИТО.
Для оценки адекватности результатов исследования на ФМ реальному процессу вводится критерий подобия, содержащий комбинацию значений физических параметров, характеризующих ИТО.
Например, течение вязкой жидкости в двух трубах диаметром d1 и d2 будут подобны, если совпадут значения чисел Рейнольдса для обеи труб (отношение (V1d1/1) = (V2d2/2), где – кинематическая вязкость; V - скорость потока жидкости.
Физическое моделирование – исследование процессов и явлений в ИТО с помощью ФМ при равенстве критерия подобия ФМ и ИТО.
Изоморфность ММ – одинаковое по форме математическое описание для разных по природе физических явлений.
Переменные в ММ – координаты пространства поведения ММ – это величины, подлежащие изменению или определению при решении задач ИТО.
Выходные переменные – величины, характеризующие состояние ИТО и подлежащие определению в процессе моделирования ИТО.
Входные переменные – величины, целенаправленно изменяемые самим исследователем (в соответствии с алгоритмом моделирования) при решении задач ИТО с помощью ММ.
Параметры ММ – постоянные величины (или заранее заданные функции времени), обычно не изменяемые в процессе исследования системы (бывают внешние (Q), внутренние (X) и выходные (Y)).
Априорная модель – модель, построенная (выбранная) до начала исследований.
Аддитивность величин – свойство, заключающееся в том, что значение выходной переменной целого ИТО равно соответствующих выходных величин составных его частей.
Полная идентификация ММ – определение параметров и структуры ММ ИТО, обеспечивающих наилучшее совпадение выходных координат ИТО и ММ при одинаковых входных воздействиях.
Параметрическая идентификация ММ – определение параметров ММ при заданной ее структуре, обеспечивающих наилучшее совпадение выходных координат ИТО и ММ при одинаковых входных воздействиях.
Апостериорная модель – модель, улучшенная по результатам экспериментальных исследований (уточненная).
«Черный ящик» – это ИТО, у которого при неизвестных внутренней организации, структуре и характере поведения элементов имеется возможность наблюдать или контролировать реакцию выходных элементов на изменение входных воздействий.
Перечислим требования к ММ указанных классов:
- полнота модели – ММ должна обеспечивать возможность получения необходимого и достаточного набора оценок характеристик ИТО с требуемой точностью при заданной достоверности;
- гибкость модели – ММ должна давать возможность воспроизведения различных ситуаций при изменении структуры (алгоритмов) ММ и параметров ИТО;
- точность модели – ММ должна допускать возможность замены, добавления и исключения частей ММ без смены всей модели
. наконец, ММ должна обеспечивать эффективность машинного эксперимента.
ММ-е конструкции ИТП микро- и наносистем целесообразно использовать:
- для исследования ТО до того как он спроектирован с целью обеспечения чувствительности выходных характеристик ТО к изменению параметров ИТО и внешней среды;
- на этапе проектирования ТО для анализа и синтеза альтернативных вариантов построения ТО и выбора среди них одного, удовлетворяющего выбранному критерию эффективности;
- для прогнозирования развития ИТО во времени.
Переменные математических моделей (координаты пространства поведения математических моделей) – это величины, подлежащие изменению или определению при решении задач исследуемых физических объектов.
Выходные переменные – это величины, характеризующие исследуемый технический объект и подлежащие определению в процессе моделирования исследуемого физического объекта.
Входные переменные – это величины, целенаправленно изменяемые (самим исследователем, в соответствии с моделируемым алгоритмом) при решении на математической модели задач исследуемого технического объекта.
Параметры математической модели – постоянные величины (или заранее заданные функции, временные изменения которых дополняются между решениями задач моделирования).
Априорная модель – модель, построенная до начала специального экспериментального исследования или выбранная априорно исследователем.
Аддитивность величин – свойство, заключающееся в том, что значения направленной выходной переменной величины целого исследуемого технического объекта равно сумме соответственных выходных величин, - частей целого объекта равно n- значениям величин соответствующих частей целого при разбиении объекта на части.
Идентификация математической модели (полная) - означает определение параметров и структуры математической модели исследуемого технического объекта, обеспечивающих наилучшее совпадение выходных координат исследуемого технического объекта и математической модели при одинаковых входных воздействиях.
Параметрическая идентификация математической модели – определение параметров математической модели при заданной ее структуре, обеспечивающих наилучшее совпадение выходных координат исследуемого технического объекта и математической модели при одинаковых входных воздействиях.
Апостериорная модель – (математическая модель) – модель, улучшенная по результатам экспериментов (уточненная).
Аппроксимированная (гипотетическая) математическая модель - упрощенная, приближенная математическая модель.
«Черный ящик» – это исследуемый технический объект, у которого при неизвестной внутренней организации, неизвестной структуре и неизвестном характере поведения элементов имеется возможность наблюдать или контролировать реакцию выходных элементов на изменение входных.
Место математического моделирования в инженерном анализе – определение места инженерного анализа (ИА) в процессе создания и жизни ЭВА.
З


 амысел
амысел
Р азработка
(проектирование) <=>
инженерный анализ
азработка
(проектирование) <=>
инженерный анализ

И зготовление (производство)
Э

 ксплуатация
ксплуатация
С нятие
с эксплуатации
нятие
с эксплуатации
Определим графически место моделирования в инженерном анализе:
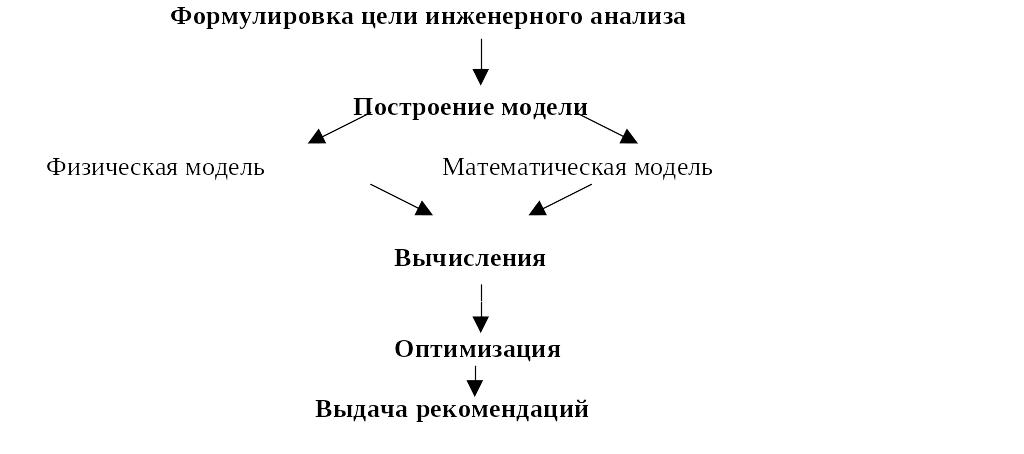
Рис.1.1. Место моделирования в инженерном анализе.
Последовательность разработки и машинной реализации математической модели исследуемого объекта интересующего нас класса. Нас интересуют следующие классы исследуемых технических объектов:
Конструирование ЭВА.
Технологические процессы изготовления ЭВА.
Основные требования, предъявляемые к математическим моделям исследуемых технических объектов интересующего нас класса:
Полнота математической модели должна представлять возможность получения необходимого набора оценок характеристик исследуемого технического объекта с требуемой точностью и достоверностью.
Гибкость математической модели должна давать возможность воспроизводства различных ситуаций при варьировании структуры (алгоритма) математической модели, параметров исследуемого технического объекта.
Структура математической модели должна быть блочной, т.е. допускать возможность замены, добавления и исключения некоторых частей без перемены всей модели
Определенные требования к программному обеспечению с целью увеличения обеспечения эффективности машинного эксперимента.
Математическое моделирования конструкции исследуемого технического производства ЭВА целесообразно использовать в следующих случаях:
А) - для исследования технического объекта до того, как он спроектирован с целью обеспечения чувствительности выходных характеристик к изменению параметров исследуемого технического объекта и внешней среды.
Б) – на этапе проектирования для анализа и синтеза альтернативных вариантов построения и выбора среди них одного, который удовлетворяет заданному критерию оценки эффективности функционирования исследуемого технического объекта.
В) – для прогноза развития исследуемого технического объекта во времени.
Как правило, результаты разработки конструкции РЭА получаются неоднозначными и приходится принимать решение об их пригодности на основе испытаний опытных образцов. Однако ввиду высокой сложности этих конструкций, реализующих зачастую целые системы, изготовление опытных образцов весьма трудоемко и дорогостояще. Поэтому, целесообразно до изготовления изделия проводить анализ проектируемых конструкций на основе аналогового или цифрового моделирования на ЭВМ протекающих в ней физических процессов под воздействием внешних и внутреннмх дестабилизирующих факторов. Результаты такого моделирования призваны заменить на стадии проектирования дорогостоящие испытания. (Прототипирование).
Выявляя сильные и слабые стороны получаемых в результате моделирования вариантов конструкции, можно принять более обоснованное решение.
Любое устройство ЭВА работает в условиях влияния внутренних и внешних факторов, имеющих различную физическую природу.
К внешним факторам относятся параметры окружающей среды (температура и влажность), механические воздействия (вибрация, удары, деформирующие силы …), внешние электромагнитные поля.
Внутренние факторы связаны с источниками энергии внутри рассматриваемой конструкции, к которым относятся тепловыделяющие элементы конструкции, источники внутренних электростатических, магнитных и электромагнитных полей.
Под воздействием перечисленных факторов изменяется надежность устройства и его характеристики. То есть, степень пригодности выбранной конструкции определяется ее реакцией на внутренние и внешние возмущения.
Процесс работы устройства ЭВА в реальных условиях можно представить следующей схемой:
Внутренние и внешние возмущения |
|
Система параметров устройства ЭВА |
|
Реакция конструкции |
|
|
|||
|
||||
В процессе анализа конструкции ЭВА нас будет интересовать правая часть данной схемы – то есть выявление реакции конструкции на заданные возмущения. С этой целью проведем классификацию процессов, протекающих в ЭВА. Эти процессы подразделяются на стационарные и нестационарные. Процесс называется стационарным, если внешние и внутренние возмущения практически не изменяются во времени, то есть наблюдается состояние установившегося режима работы конструкции. Если внешние или внутренние возмущения изменяются во времени, стационарность условий работы ЭВА нарушается – такие условия или процессы называются нестационарными.
Для моделирования задач анализа конструкций ЭВА отличие между стационарными и нестационарными условиями является существенным, поскольку методы их решения различны.
В первом случае, когда реакция системы, а также внешние и внутренние возмущения не меняются во времени, задачу определения реакции системы называют краевой задачей. Для решения таких задач достаточно найти величину реакции и ее распределение в конструкции. Примером краевой задачи может служить задача определения распределения температур в блоке ЭВА при заданном установившемся режиме работы и постоянной температуре окружающей среды. Краевыми условиями здесь являются температура окружающей среды или плотность потока тепловой энергии обмена с окружающей средой.
Во втором случае, когда реакция системы является функцией времени, задачу определения реакции системы называют задачей с начальными условиями (НУ). В таких задачах для определения реакции системы необходимо знать ее поведение в начальный и последующие интервалы времени.
Напрмер, когда температура источников тепла в блоке и окружающей среде меняются во времени, задача носит нестационарный характер и является задачей с начальными условиями (условия Коши). В такой задаче требуется определить температуру в блоке в каждый момент времени при заданной температуре в начальный момент времени.
Задача анализа процессов в конструкциях ЭВА чаще всего сводится к исследованию различных полей (тепловых и электромагнитных) или механических явлений (вибрации и распределение напряжений в конструкции). Указанные процессы описываются с помощью диффернциальных уравнений (ДУ), поэтому их анализ сводится к решению ДУ в частных производных. Подобные уравнения в отличие от обыкновенных дифференциальных уравнений содержат не одну переменную, и результатом их решения является определение функции от нескольких переменных. В состав таких уравнений входят частные производные по каждой переменной.
Многие нестационарные физические процессы в пространстве описываются с помощью ДУ вида:
d / dX [ A1(x,y,z,f,t) d / dX] + d / dY [ A2(x,y,z,f,t )d / dY]+
+ d/dZ [A3(x,y,z,f,t)d/dZ] = a (d2 / dt2) +b (d / dt ) + c + d (1)
где:
a= 1(x,y,z,f,t) 0 b= 2(x,y,z,f,t) 0
c= 3(x,y,z,f,t) 0 d= 4(x,y,z,f,t) 0
Функции A1, A2, A3 определяют параметры вещества пространства. Если среда изотропная, то A1= A2=A3 = const >0. В противном случае A1 A2A3, причем полагают A1 = const >0, A2 = const >0, A3 = const >0. В первом случае говорят о плоской (линейной) задаче.
Значение искомой функции находится внутри некоторой области V, ограниченной поверхностью S – для трехмерной, и линией S – для двумерной задачи. На границе поверхности (линии) S задаются граничные условия вида:
( + d/dn)S = Ф, где: и - заданные функции точки в граничной области; Ф=Ф(x,y,z,f,t) – некоторая функция, значение которой в граничной области известны; d/dn – производная искомой функции по нормали к граничной области в рассматриваемой точке.
Если во всех точках граничной поверхности = 0, то есть функция Ф во всех точках определяет значение искомой функции , то такие условия называются граничными условиями первого рода: S = Ф1. Если же во всех точках граничной поверхности S = 0, то есть определены лишь значения производной искомой функции по нормали к этой области, то такие условия считают граничными условиями второго рода: d/dnS = Ф2. В том случае, когда имеют место смешанные варианты условий, заданные выражением граничных условий общего вида, то их называют граничными условиями третьего рода.