§8. Захватные устройства пр.
ЗУ служат для захвата предмета и его удержания в определённом положении при перемещении или обработке.
Вид ЗУ определяют:
- форма;
- размеры, масса, свойства предмета;
- а также надёжность удержания, точность базирования предметов ЗУ, недопустимость разрушения предмета, требования минимальности массы и габаритов и другое.
ЗУ классифицируется по следующим признакам:
1) По принципу действия
- механические;
-магнитные;
-вакуумные;
-с эластичными камерами.
1.1 Механические ЗУ – наиболее распространены. По типу передаточного механизма различают:
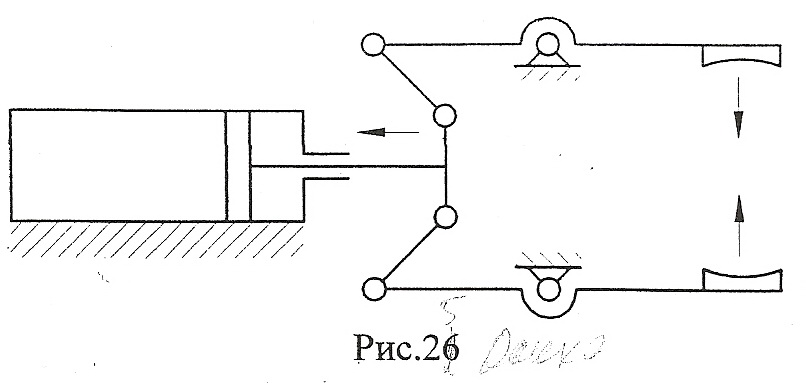
а) рычажно-стержневые - рис 26
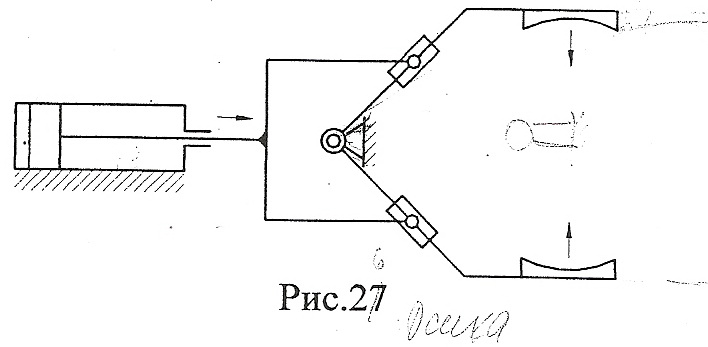
б) кулисно-стержневые – рис 27
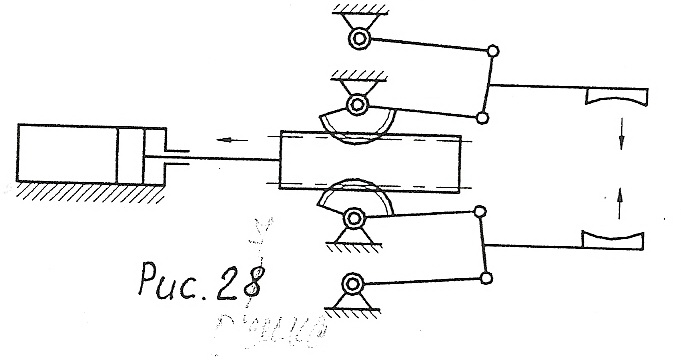
в) зубчатые – рис 28
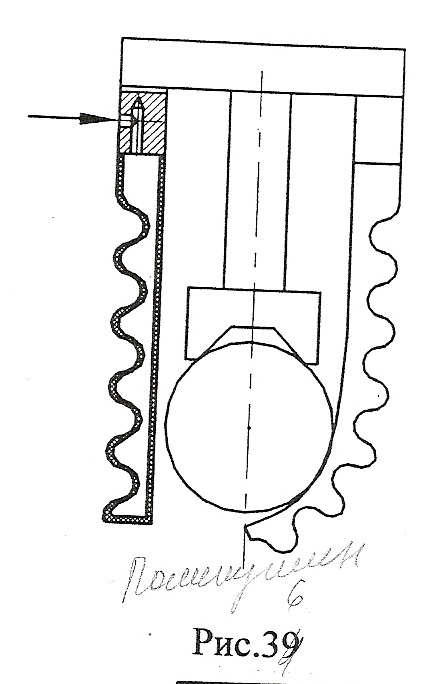
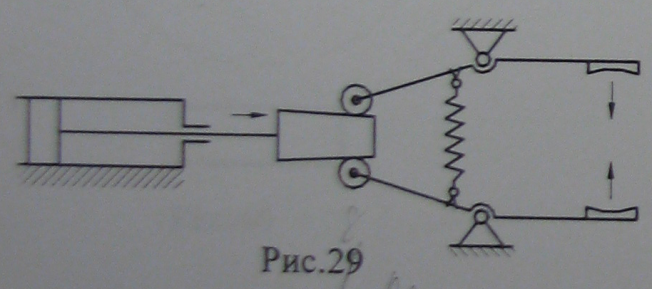
г) клиновые – рис 29
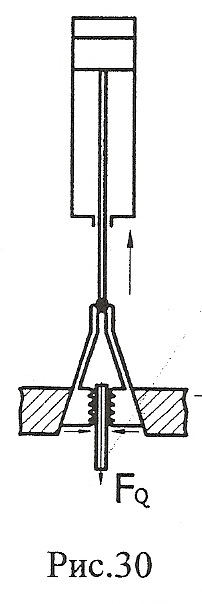
д) цанговые – рис 30
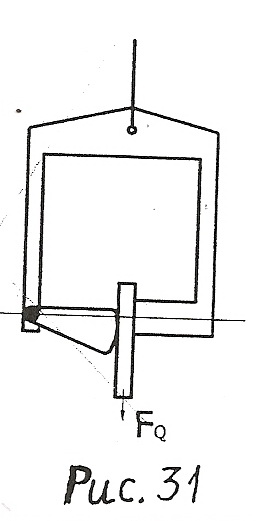
е) эксцентриковые – рис 31
На рисунках 26-30 стрелками показаны направления движения штока цилиндра и губок при захвате.
Цанговые и эксцентриковые ЗУ в роботах применяются редко из-за неточного положения детали ЗУ и сложности удаления детали из ЗУ.
1.2 Магнитные ЗУ.
- с постоянными магнитами и
- электромагнитами.
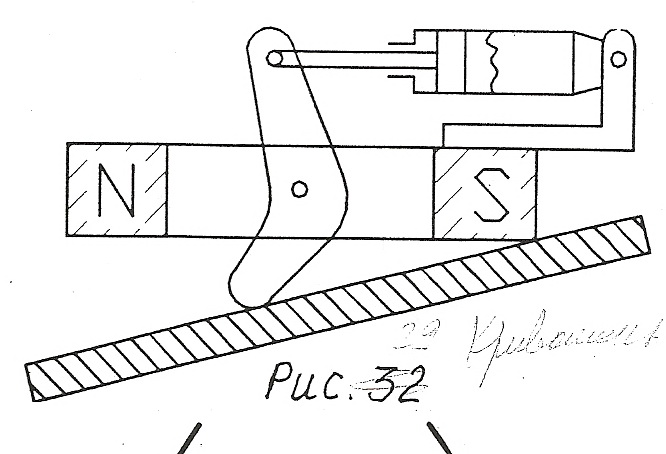
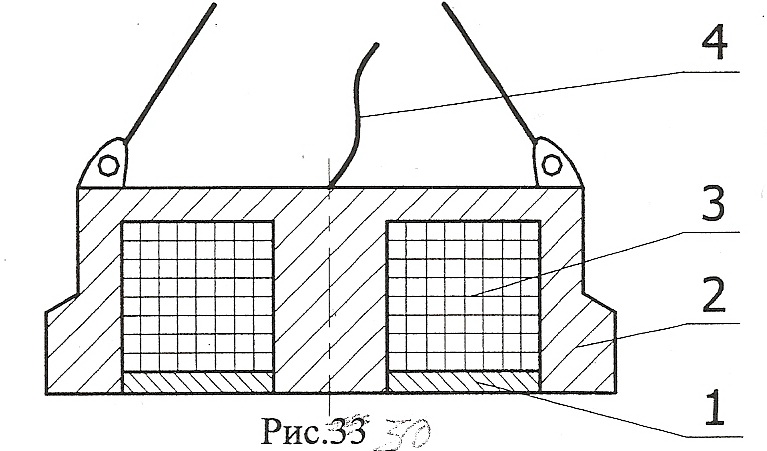
Эти ЗУ пригодны только для предметов из магнитных материалов. Постоянные магниты (рис 32) надёжны и не расходуют энергию, но требуется устройство для отделения детали от магнита.
Электромагниты (рис 33) состоят из корпуса 2, выполненного из стали с высокой магнитной проницаемостью. Внутри которого размещена катушка 3, размещена за счет трения с шайбой 1 из марганцовистой стали. По гибкому кабелю 4 на катушку подаётся электрический ток.
На рис34 – универсальный электромагнитный захват, снабжённый эластичными оболочками 1, заполненными железным порошком 2 и способный захватывать детали 3 с фасонной поверхностью.

1.3 Вакуумные ЗУ.
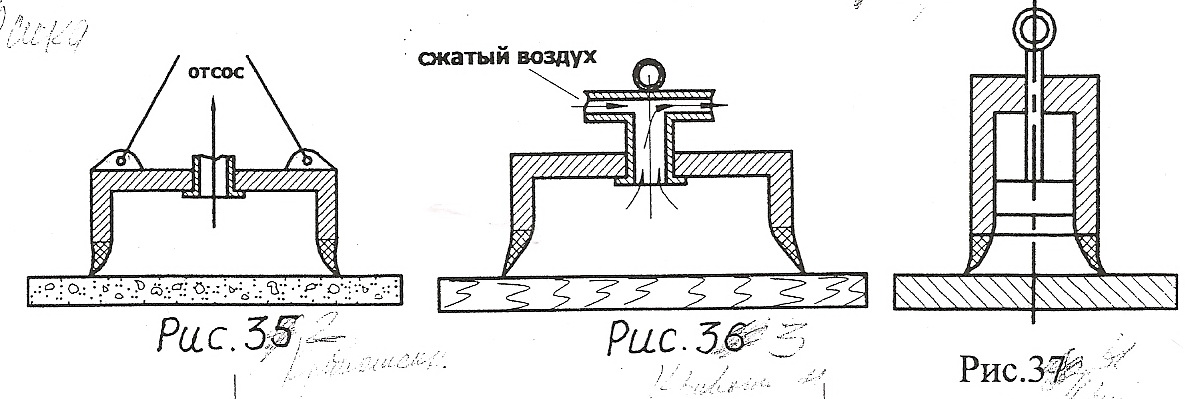
Бывают с вакуумным насосом (рис 35), эжекторные (рис 36), и безнасосные (рис 37) (самовакуумирующиеся).
ЗУ с вакуумным насосом и эжекторные целесообразны для воздухопроницаемых материалов (бетон, керамика и т.д.). В безнасосных ЗУ вакуум создают одноразовым изменением объёма полости вакуум-камеры. Их применяют только для воздухонепроницаемых материалов (металл, стекло).
Достоинства:
- простота конструкции;
- полная автономность;
1.4 ЗУ с эластичными камерами.
Действие этих ЗУ основано на деформировании камеры под давлением жидкости или газа. Различают оболочковые и кольцевые ЗУ.
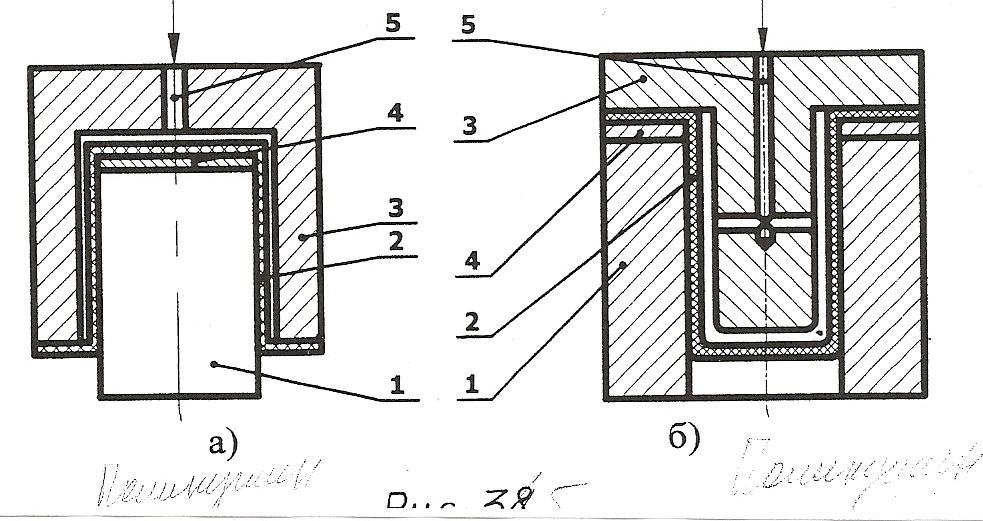
В оболочковых ЗУ (рис.38) предмет базируется на эластичной камере.
Рис 38(а) – захват детали по наружной поверхности
Рис 38(б) – захват детали по внутренней поверхности
1- захватываемая деталь
2- эластичная камера
3- корпус ЗУ
4- защитная шайба, предохраняющая эластичную камеру от повреждений
5- каналы для подвода воздуха или жидкости.
В кольцевых ЗУ (рис 39) эластичная камера базируется по предмету. Внутренняя поверхность кольцевая более жесткая, чем наружная. Поэтому под давлением воздуха или жидкости кольца изгибаются и прижимаются к детали.
Рис 39. Левый палец - в нерабочем положении в разрезе, а правый – в рабочем положении.